Глава 8. Принцип действия, элементы конструкции и характеристики основных типов электрических машин.
Содержание главы:
- 8.1. Общие сведения
- 8.1.1. Преобразование энергии связано с вращающимися магнитными полями
- 8.1.2. Для обеспечения непрерывного преобразования энергии необходимо, чтобы поле хотя бы одной из обмоток периодически изменялось бы в пространстве
- 8.1.3. Однонаправленный момент создают только взаимно неподвижные поля
- 8.1.4. Процесс электромеханического преобразования энергии в любой электрической машине обратим
- 8.2. Принцип действия коллекторных машин постоянного тока
- 8.2.1. Простейшая модель МПТ
- 8.2.2. Особенности конструкции и работы реальных машин постоянного тока
- 8.3. Характеристики МПТ при различных способах возбуждения
- 8.3.1. МПТ с независимым возбуждением
- 8.3.2. МПТ с последовательным возбуждением
- 8.3.3. МПТ со смешанным возбуждением
- 8.4. Принцип действия и характеристики асинхронных машин
- 8.4.1. Простейшая модель асинхронной машины
- 8.4.2. Особенности конструкции реальных асинхронных машин
- 8.4.3. Основные соотношения для асинхронного двигателя
- 8.4.4. Однофазные асинхронные двигатели
- 8.4.5. Единые серии асинхронных машин
- 8.5. Принцип действия и характеристики синхронных машин
- 8.5.1. Простейшая модель синхронной машины
- 8.5.2. Особенности конструкции и характеристики реальных синхронных машин
- 8.5.3. Синхронные шаговые двигатели
- 8.6. Потери мощности и энергетические характеристики электрических машин
8.1. Общие сведения.
Наибольшее распространение получили электрические машины вращательного типа. Они состоят из двух основных частей – статора и ротора, разделенных воздушным зазором. Ротор вращается, статор неподвижен. Обычно и статор и ротор изготовлены из листов электротехнической стали с высоким удельным сопротивлением (например, из кремнистой стали). Обмотка называется статорной или роторной в зависимости от того, где она находится.
Можно выделить четыре закона электромеханики, лежащих в основе процесса преобразования энергии в индуктивных электрических машинах.
8.1.1. Преобразование энергии связано с вращающимися магнитными полями.
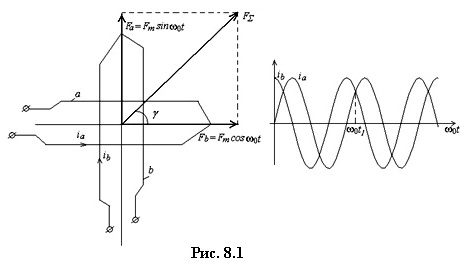
Вращающиеся поля присутствуют во всех электрических машинах вращательного типа. Относительно неподвижного наблюдателя вращающееся поле может быть создано как вращающейся относительно него обмоткой, так и неподвижной. Для объяснения принципа образования вращающегося магнитного поля неподвижными в пространстве обмотками обратимся к рис. 8.1, на котором показаны два электрически не связанных витка (катушки) а и b, расположенных под углом 90°.
При протекании по витку а переменного тока ia=Imsinω0t магнитодвижущая сила (МДС), созданная этим током Fa =Fmsinω0t (ее направление определяется по правилу правоходового винта или буравчика), пульсирует вдоль оси, перпендикулярной плоскости витка. Соответственно, при протекании переменного тока ib=Imcosω0t по витку b, МДС, созданная им Fb =Fmcosω0t, пульсирует вдоль оси, перпендикулярной плоскости этого витка. Таким образом, пространственное положение векторов Fa и Fb неизменно (рис. 8.1), а их модули изменяются во времени по гармоническому закону.
Однако модуль вектора результирующей МДС:

остается постоянным, а его положение в пространстве, определяемое углом γ, изменяется с течением времени (на рис. 8.1 положение векторов Fa, Fb и FΣ соответствует некоторому моменту времени t1). В данном случае угол γ определяется из выражения:

откуда следует γ = ω0t, т.е. вектор FΣ вращается в пространстве с постоянной угловой скоростью, равной ω0. Как видно, для получения вращающегося магнитного поля необходимо минимум две обмотки, сдвинутых в пространстве на угол 90°, по которым протекают переменные токи, сдвинутые во времени на 90°. Каждая из этих обмоток образует фазу электрической машины.
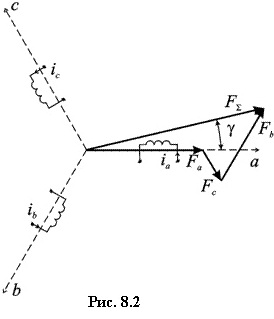
В реальных машинах число фазных обмоток, как правило, больше двух. Наибольшее распространение получили трехфазные двигатели. В них фазные обмотки, расположенные по осям a, b и c, имеют пространственный сдвиг в 120° и питаются трехфазной системой токов ia, ib и iс, которые также создают пространственно смещенные пульсирующие фазные МДС Fa, Fb ,Fс и суммарную вращающуюся МДС FΣ (см. рис. 8.2, где положение векторов Fa, Fb, Fс и FΣ соответствует некоторому текущему моменту времени).
Как видно, общий принцип образования вращающегося магнитного поля – многофазная обмотка, каждая фаза которой имеет соответствующее пространственное смещение относительно других фаз, питаемая многофазной системой токов с взаимными временными сдвигами, справедлив при любом числе фаз. При этом, если за период изменения фазных токов вектор FΣ совершает один полный оборот, то создаваемое магнитное поле является двухполюсным, т.е. содержит один северный и один южный полюс. При соответствующем выполнении обмотки электрических машин могут образовывать вращающееся магнитное поле, содержащее не одну, а несколько пар полюсов. Поэтому в общем случае при числе пар полюсов p один полный оборот вектора FΣ совершается за p периодов изменения фазных токов.
Нужно особо отметить главную особенность таких обмоток – вращение поля относительно создающей его обмотки. Поэтому в частном случае (например, в коллекторных машинах постоянного тока) они могут создавать и неподвижное в пространстве поле, если обмотка расположена на роторе и скорости вращения ротора и поля равны и противоположно направлены. Однако, в принципе, вращающееся с некоторой произвольной угловой скоростью ω магнитное поле может быть создано вращающейся с такой же скоростью обмоткой, но при протекании по ней уже постоянного тока. В этом случае поле неподвижно относительно создающей его обмотки.
В идеале, при конструировании любой электрической машины стремятся обеспечить круговое вращающееся магнитное поле, когда годографом конца вектора суммарной МДС является окружность. Однако реально из-за конструктивных особенностей машины (наличия пазов, в которые укладываются фазные обмотки, непостоянства воздушного зазора, например, в машинах с явно выраженными полюсами), изменения свойств магнитных материалов и т.п.), технологических погрешностей изготовления, а также условий питания (например, импульсных помех на выходе источника питания) его форма в той или иной степени отличается от окружности. Это ведет к появлению дополнительных пульсирующих моментов и снижению эффективности электромеханического преобразования энергии и, кроме того, провоцирует вибрации, шум и т.д.
8.1.2. Для обеспечения непрерывного преобразования энергии необходимо, чтобы поле хотя бы одной из обмоток периодически изменялось бы в пространстве.
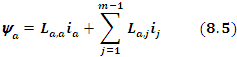
Перемещение ротора относительно статора в электрической машине любого типа обязательно должно приводить к периодическому пространственному изменению поля хотя бы одной обмотки при протекании по ней тока. У большинства реальных машин закон изменения поля таких обмоток, как правило, близок к синусоидальному закону. Эти обмотки обладают важным и специфическим для электрических машин свойством – в них наводится ЭДС движения. Для пояснения этого рассмотрим схему замещения такой обмотки (например, обмотки фазы а, как показано на рис. 8.3 а). Уравнение электрического равновесия фазы в соответствии со вторым законом Кирхгофа имеет вид

где uа – фазное напряжение; Ra – активное сопротивление фазы; ea=-(dψa)/dt – ЭДС электромагнитной индукции, наводимая в фазе; ψa – потокосцепление фазы, которое применительно к данному случаю является функцией двух переменных – тока ia и углового положения ротора θ = ωt (это проиллюстрировано на рис. 8.3,б, где показано распределение потокосцепления для четырех характерных значений тока i1, i2, i3, i4); ω – скорость вращения ротора. Тогда в соответствии с правилом дифференцирования сложной функции ЭДС фазы определяется как

В реальной машине фазных обмоток несколько, поэтому в общем случае потокосцепление фазы определяется как
где La,a – индуктивность фазы; La,j – взаимная индуктивность фазы а с другими фазами; m – число фаз.
Первое слагаемое в (8.4) определяет составляющую ЭДС, обусловленную изменением тока ia. Она характерна для всех электромагнитных устройств, питаемых переменным током, например, для трансформаторов, поэтому её иногда называют трансформаторной ЭДС. Вторая же составляющая ЭДС, представленная в (8.4) в наиболее общем виде, пропорциональна скорости вращения ротора ω и является следствием перемещения ротора относительно статора. Она присуща только электрическим машинам и получила название ЭДС движения.
Заметим, что поскольку ЭДС еа зависит от скорости, ее изменения, обусловленные механическими процессами, в соответствии с уравнением (8.3) приводят к соответствующему изменению тока, потребляемого обмоткой электрической машины. Таким образом, механические и электрические процессы в электрических машинах протекают одновременно, оказывая соответствующее влияние друг на друга. Для обобщения этого явления в электромеханике используют понятие электромеханической связи, отражающего именно эту взаимосвязь.
Обмотку, в которой наводится ЭДС движения, называют якорной обмоткой. Именно благодаря этой ЭДС и току осуществляется обмен энергией между электрической машиной и электрической сетью. Как видно из (8.4) и (8.5), ЭДС движения отлична от нуля только в том случае, если собственная или взаимная индуктивность фазы зависит от пространственной координаты. Еще раз подчеркнем, что поток, создаваемый обмоткой якоря, всегда перемещается относительно создающей его обмотки. Если же поле неподвижно относительно обмотки, в ней не наводится ЭДС движения. Такие обмотки называют обмотками возбуждения. Обмотки возбуждения питаются постоянным током и служат для создания основного магнитного потока в воздушном зазоре электрической машины. Как частный случай, обмотка возбуждения может быть неподвижной в пространстве. Тогда и поле, созданное ею, также неподвижно в пространстве.
Таким образом, теоретически каждая из обмоток (якоря или возбуждения) может находиться на роторе или на статоре, важно лишь то, что они перемещаются друг относительно друга. Здесь нужно однако заметить, что существуют электрические машины и с взаимно неподвижными обмотками якоря и возбуждения. Это, в частности, характерно для машин индукторного типа с независимым электромагнитным возбуждением. Для практического удобства синхронные и асинхронные машины переменного тока чаще имеют неподвижный якорь, так как в нем легче выполнить прочную обмотку, способную выдерживать значительные электромагнитные силы.
Если роль якоря выполняет ротор, он должен соединяться с сетью через контактные кольца. Обычно мощность, потребляемая обмоткой возбуждения значительно меньше мощности, потребляемой обмоткой якоря, поэтому скользящий контакт удобнее использовать для питания обмотки возбуждения. Таким образом, сказанное выше позволяет также различить обмотки электрических машин по их функциональному назначению – на обмотки возбуждения и обмотки якоря.
8.1.3. Однонаправленный момент создают только взаимно неподвижные поля.
Этот закон позволяет с общих позиций достаточно легко объяснить принцип действия и различия основных типов электрических машин. Для этого предположим, что на статоре электрической машины расположена неподвижная в пространстве многофазная (в простейшем случае двухфазная) обмотка, создающая вращающееся со скоростью ω0 относительно неподвижного наблюдателя магнитное поле.
Вариант 1
Ротор вращается со скоростью вращения поля статора ω0. В этом случае поля статора и ротора могут быть взаимно неподвижны только если поле ротора неподвижно относительно ротора. Такое поле, как уже отмечалось, может быть создано при протекании по обмотке ротора постоянного тока. При этом нет необходимости обмотку ротора выполнять многофазной и распределенной в пространстве.
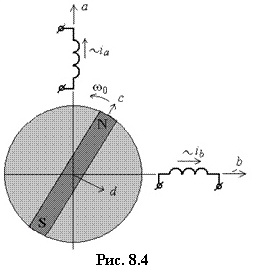
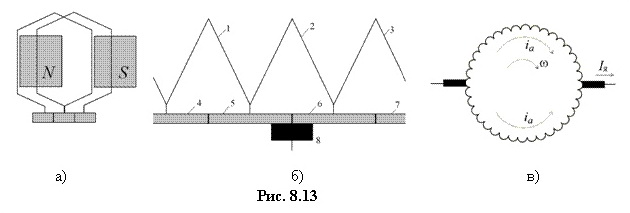
В целях упрощения конструкции ротора обмотку иногда выполняют в виде сосредоточенной катушки – соленоида. Питание к ней подводится с помощью скользящего контакта. В машинах относительно небольшой мощности (до единиц киловатт) сосредоточенная обмотка (обмотка возбуждения) может заменяться постоянным магнитом (рис. 8.4). И то, и другое характерно для электрических машин синхронного типа.
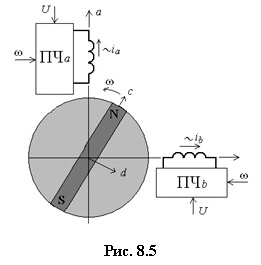
Частным случаем машин этого типа являются машины, в которых скорость вращения поля переменна, но однозначно определяется скоростью вращения ротора. Статорные обмотки получают питание от специального многофазного преобразователя частоты (на рис. 8.5 ПЧа и ПЧb), питаемого от сети постоянного тока напряжением U и обеспечивающего изменение частоты выходного тока в функции скорости вращения ротора ω. Это характерно для электрических машин постоянного тока.
Еще раз подчеркнем, что в машинах постоянного тока скорость вращения поля якоря ω0 и скорость вращения ротора ω в общем случае не остаются постоянными, но всегда равны между собой, т.е. ω0 = ω, поэтому они с точки зрения особенностей электромеханического преобразования энергии могут быть отнесены к машинам синхронного типа. Причем преобразователь частоты может быть механическим (коллекторные машины) или полупроводниковым (бесконтактные машины постоянного тока или БДПТ). При этом, следует еще раз обратить внимание на то, что свое название машины постоянного тока получили в соответствии с характером изменения тока, потребляемого из источника питания. В фазных же обмотках этих машин протекают переменные токи.
В реальных коллекторных машинах постоянного тока многофазная якорная обмотка располагается обычно на роторе, а обмотка возбуждения, обтекаемая постоянным током, или постоянные магниты располагаются на статоре. Наоборот, в БДПТ якорная обмотка чаще располагается на статоре, а поток возбуждения создается постоянными магнитами или специальной обмоткой, расположенными на роторе.
В принципе преобразователь частоты может получать питание и от источника переменного тока (например, от промышленной сети). В этом случае он преобразует переменное напряжение неизменной частоты в переменное напряжение регулируемой частоты. Такие машины также находят иногда применение. Их называют коллекторными машинами переменного тока.
Вариант 2
Скорость вращения ротора ω не равна, например, меньше скорости вращения поля статора ω0. В этом случае для того, чтобы поля статора и ротора были взаимно неподвижны, поле ротора должно вращаться относительно ротора в ту же сторону, что и ротор так, чтобы сумма скоростей ротора относительно статора и поля ротора относительно ротора равнялась бы скорости вращения поля статора.
Возможны и другие комбинации направлений вращения ротора и полей статора и ротора, например, вращение ротора в противоположную сторону по отношению к направлению вращения поля статора. Тогда, соответственно, направление вращения ротора и поля, созданного им, противоположны, но поля статора и ротора, тем не менее, вращаются и в этом случае в одном направлении с одинаковой скоростью.
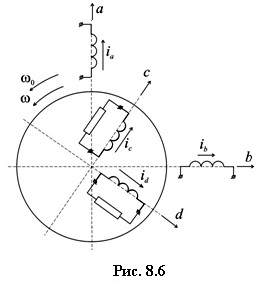
Ротор, как и статор, в такой машине должен иметь распределенную в пространстве многофазную обмотку, питаемую многофазным переменным током (на рис. 8.6 ее образуют обмотки c и d). При этом, поскольку поле статора перемещается относительно ротора, электрическая энергия в ротор может передаваться электромагнитным путем (как в трансформаторе) и ротор не получает питания извне. При этом, как только ротор и поле статора начинают вращаться с одинаковой скоростью в одном направлении, энергия в ротор не передается и, соответственно, электромеханического преобразования энергии не происходит. Это характерно для обычных электрических машин асинхронного типа.
Для асинхронных машин вводится понятие скольжения
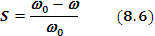
Как видно из (8.6), скольжение – относительная величина, определяемая как скорость вращения ротора относительно скорости вращения поля статора в долях скорости вращения поля статора. Заметим, что в асинхронных машинах в обычных режимах работы поля статора и ротора перемещаются относительно создающих их обмоток, поэтому и статорная и роторная обмотки в них являются якорными.
В частном случае с целью дополнительного расширения функциональных возможностей машины ее роторные обмотки могут получать питание от отдельного регулируемого многофазного источника переменного тока (преобразователя частоты). Такие электрические машины получили название машины двойного питания.
8.1.4. Процесс электромеханического преобразования энергии в любой электрической машине обратим.
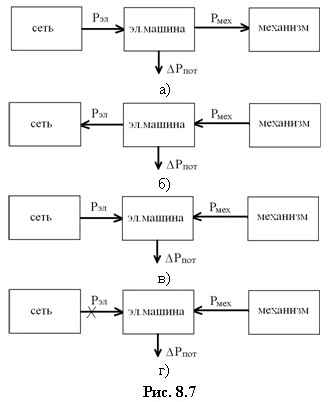
Любая электрическая машина может работать как двигателем, так и генератором (принцип обратимости направления преобразования энергии). В двигательном режиме работы механическая мощность, вырабатываемая машиной, всегда меньше электрической мощности на величину потерь ΔPпот, поэтому энергетическая диаграмма для этого режима может быть представлена, как на рис. 8.7 а.
В современном электроприводе генераторные режимы работы электрических машин используют, как правило, не столько для сколько-нибудь длительной выработки электрической энергии и питания ею потребителей, сколько с целью преобразования излишков меха-нической энергии в электрическую энергию для увеличения темпа снижения скорости или торможения электрических машин и приводимых в движение механизмов.
В общем случае различают три тормозных режима работы, отличающихся направлениями потоков мощности: рекуперативный, когда механическая мощность Pмех преобразуется в электрическую и за вычетом потерь ΔPпот возвращается в сеть (рис. 8.7 б); противовключения, когда машина потребляет энергию с вала Pмех и из сети Pэл и преобразует их в потери ΔPпот (рис. 8.7 в); динамического торможения, когда машина не получает энергию из сети, а в потери ΔPпот преобразуется только энергия, поступающая с вала Pмех (рис. 8.7 г). Некоторые машины могут работать во всех выделенных режимах, для других некоторые режимы физически не реализуемы.
Еще раз обратим внимание на то, что преобразование энергии в электрических машинах любого типа всегда сопровождается потерями (электрическими, магнитными, механическими и т.п.), поэтому их КПД в любом режиме работы всегда меньше единицы. Кроме того, важно подчеркнуть, что рассмотренные с принципиальных позиций возможные типы электрических машин в настоящее время имеют не одинаковое распространение в промышленности. Предпочтение в каждом конкретном случае определяется технологичностью их реальных конструкций, стоимостью, надежностью, материалоемкостью, а также регулировочными возможностями и т.п.
В настоящее время в силу ряда как объективных, так и субъективных причин наибольшее распространение имеют асинхронные машины. Сектор, занимаемый долгое время традиционными коллекторными машинами постоянного тока, считавшимися непревзойденными по регулировочным свойствам, постепенно сужается. При этом они вытесняются не только асинхронными машинами, но также и бесконтактными машинами постоянного тока. Однако, во-первых, традиционные машины постоянного тока все еще остаются предпочтительными во многих применениях (транспорт, робототехника, прокатное производство, подьемно-транспортные машины, спецтехника и т.д.) и это сохранится, по-видимому, еще достаточно долго, а во-вторых, их изучение чрезвычайно важно с методологической точки зрения. При построении современных регулируемых электроприводов на базе машин других типов (в том числе асинхронных) часто их алгоритмы управления стремятся построить таким образом, чтобы процессы в них были бы максимально приближены к процессам в машине постоянного тока.
8.2. Принцип действия коллекторных машин постоянного тока.
8.2.1. Простейшая модель МПТ.
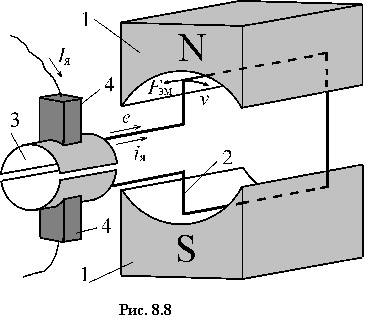
Наиболее специфическим элементом машин постоянного тока (МПТ) является коллектор – механический коммутатор. Особенности его работы поясняет рис. 8.8, где показана наиболее простая модель МПТ. Между неподвижными полюсами, создаваемыми постоянными магнитами или обмоткой возбуждения 1, находится подвижный виток (обмотка якоря) 8. Верхняя и нижняя части витка имеют электрический контакт с двумя медными цилиндрическими пластинами (3), называемыми коллекторными пластинами. Пластины не имеют электрического контакта между собой и вращаются вместе с якорем. К ним прижаты графитовые стержни (4) – щетки. Каждая щетка и соответствующая ей пластина образуют скользящий электрический контакт.
Режим генератора. Примем условно, что якорь на рис. 8.8 приводится во вращение от внешнего источника механической мощности в направлении по часовой стрелке. В соответствии с законом электромагнитной индукции в витке наводится ЭДС движения е. Она возникает вследствие изменения положения проводников якоря относительно неподвижного поля. Направление наводимой ЭДС для верхнего проводника указано на рисунке стрелкой. Оно определяется по правилу правой руки (индукция направлена в ладонь, большой палец расположен по направлению скорости, остальные пальцы – по направлению ЭДС). Поскольку ЭДС верхнего и нижнего проводников рассматриваемого витка направлены согласно, с учетом (1.20), (2.4) и рис. 1.11, имеем

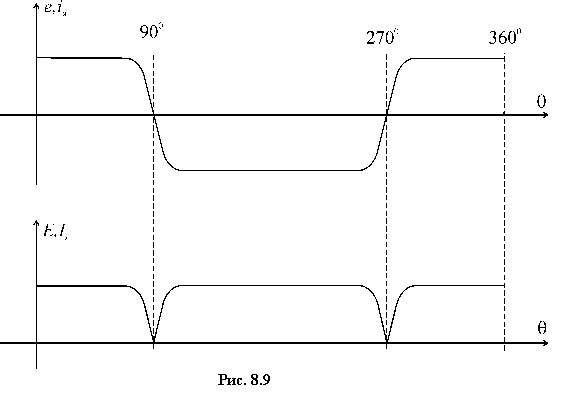
ЭДС е является переменной, так как проводники проходят то под северным, то под южным полюсом. Ее изменение в функции углового положения рамки относительно полюсов Θ в упрошенном виде показано на рис. 8.9.
Частота ЭДС пропорциональна скорости вращения якоря ω,
а если машина имеет р – пар полюсов, то
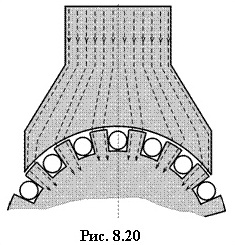
В замкнутом через внешнюю цепь (за щетками) витке течет переменный ток iя, по форме совпадающий с ЭДС е (рис. 8.9). Во внешней же цепи ток Iя не изменяет направления из-за действия коллектора, так как при повороте якоря и коллектора на 180° и изменения направления ЭДС происходит смена пластин под щетками. Соответственно, как показано на рис. 8.9, характер изменения ЭДС Е, снимаемой со щеток, совпадает с изменением Iя. Это поясняют рис. 8.10 а,б,в, где показано три характерных поочередных положения якоря относительно полюсов при его вращении. На этих рисунках крестиками и точками условно показаны направления тока во вращающемся проводнике 8. Внешняя цепь через щетки замкнута на сопротивление нагрузки R, остальные обозначения аналогичны обозначениям, принятым на рис. 8.8.
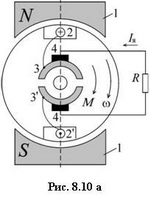
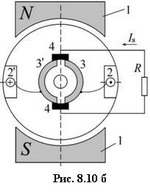
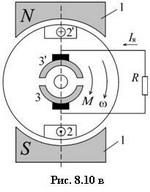
Как видно, под верхней щеткой всегда находится коллекторная пластина, соединенная с проводником, расположенным под северным полюсом, а под нижней – с южным. В генераторе коллектор является механическим выпрямителем – преобразует переменный ток обмотки якоря в постоянный ток во внешней цепи.
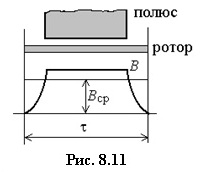
Если индукцию B в пределах полюсного деления τ = πD/2 рассматриваемой машины заменить ее средним значением Вср (см. рис. 8.11), можно получить

где Ф – магнитный поток одного полюса; k – коэффициент пропорциональности, для рассматриваемой простейшей машины равный k=2/π ; D – диаметр ротора, ω – угловая скорость вращения ротора.
Напряжение между щетками U меньше наводимой ЭДС на величину падения напряжения на сопротивлении витка R

На проводники с током, находящиеся в магнитном поле, в соответствии с законом Ампера действует сила Fэм, направление которой определяется по правилу левой руки (индукция – в ладонь, пальцы – по направлению тока, а большой палец – по направлению силы). Её модуль равен:

Эти силы создают электромагнитный момент:

который по аналогии с (8.10) определяется как

Электромагнитный момент направлен против направления вращения якоря, т.е. он уравновешивает момент внешних сил, приложенных к якорю.
Режим двигателя. Пусть теперь к якорю через коллектор подводится постоянный ток от внешнего источника электрической энергии, причем направление этого тока противоположно указанному на рис. 8.8. При этом на якорь также действуют электромагнитные силы Fэм и возникает момент М. Однако направление момента теперь совпадает с направлением вращения и он является движущим.
В режиме двигателя коллектор преобразует постоянный ток, потребляемый из сети, в переменный ток в обмотке якоря, т.е. работает механическим инвертором.
При вращении якоря в нем также наводится ЭДС, направление которой такое же, как и в режиме генератора, а направление iя изменилось, следовательно в режиме двигателя направления Iя и E противоположны. Поэтому в данном случае

Таким образом. для перехода МПТ из генераторного режима в режим двигателя и обратно при неизменном расположении щеток необходимо изменить направление тока в якоре.
8.2.2. Особенности конструкции и работы реальных машин постоянного тока.
В настоящее время МПТ изготовляются на мощности от долей ватт до десятков мегаватт. Частота их вращения колеблется от нескольких оборотов до нескольких тысяч оборотов в минуту, а номинальное напряжение их доходит до 1500-3000 В. В основном МПТ в электроприводе используются как двигатели, однако в ряде случаев находят применение и генераторы в качестве индивидуальных источников питания в регулируемых электроприводах.
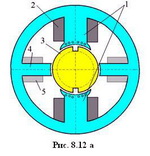
Основной магнитный поток в реальных МПТ создается главными полюсами 1 (см. рис. 8.12 а), являющимися частью неподвижного ферромагнитного магнитопровода – станины. На них располагается обмотка возбуждения 8. Для более равномерного распределения потока в воздушном зазоре машины главные полюса имеют полюсные наконечники специальной формы. В машинах относительно большой мощности на полюсных наконечниках делают пазы, в которые укладывают специальную обмотку, называемую компенсационной обмоткой (ее назначение будет пояснено ниже).
 |
 |
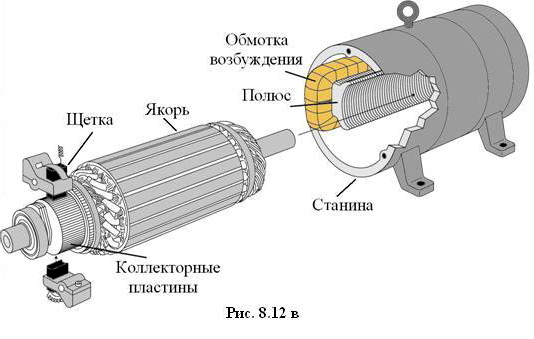 |
Рис. 8.12 а |
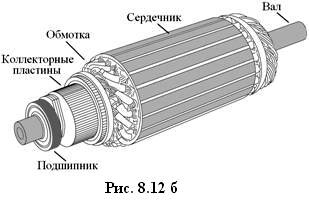
Рис. 8.12 б |
Рис. 8.12 в |
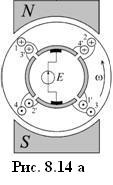
Подвижная часть МПТ – цилиндрический якорь 3 (в собранном виде он показан на рис. 8.12 б) набирается из листов электротехнической стали. На внешней поверхности он имеет пазы, в которые в два слоя укладывается якорная обмотка, состоящая из отдельных секций. Активные части каждой секции располагаются в двух пазах под разными полюсами, причем одну сторону секции укладывают в верхнем слое паза, а другую – в нижнем. По способу соединения секций между собой обмотки якорей делятся на петлевые, волновые и комбинированные. Принцип выполнения наиболее простой – петлевой обмотки – на примере двух соседних секций показан на рис. 8.13 а. Различают диаметральные обмотки, у которых расстояние между активными (расположенными в пазах) сторонами одного витка равно полюсному делению и укороченные, у которых оно меньше полюсного деления.
Выводы якорной обмотки присоединяются к коллекторным пластинам, вращающимся вместе с якорем. Щетки, располагаемые в специальных щеткодержателях (рис. 8.12 в), для улучшения электрического контакта плотно прижаты коллекторным пластинам. Независимо от способа выполнения якорной обмотки, общий принцип подключения ее секций к коллекторным пластинам можно условно изобразить, как на рис. 8.13,б, где он показан для трех соседних секций, обозначенных 1, 2, 3 и четырех соседних коллекторных пластин, обозначенных 4, 5, 6, 7, соответственно. На рис. 8.13 б также условно показана щетка 8, относительно которой перемещаются коллекторные пластины.
Как видно, секции обмотки через коллекторные пластины соединяются последовательно, образуя кольцо. Таким образом, якорную обмотку МПТ можно схематически изобразить в виде замкнутой спирали, по поверхности которой скользят щетки (см. рис. 8.13 в). Щетки делят последовательно соединенные секции обмотки на параллельные ветви, как это видно из рис. 8.13 в где обмотка имеет одну пару (а=1) параллельных ветвей. В общем случае а=1,2,3,4… В симметричной обмотке сопротивления и токи всех параллельных ветвей равны между собой.
При перемещении пластин коллектора относительно щеток секции поочередно переходят из одной параллельной ветви в другую. Этот процесс, называемый коммутацией, приводит к поочередному изменению направления тока в секциях.
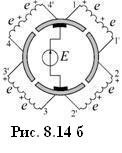
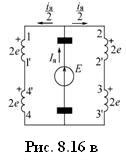
Более детально процесс коммутации можно проиллюстрировать на упрощенном варианте МПТ с четырехсекционной обмоткой на якоре и, соответственно, с четырьмя коллекторными пластинами. На рис. 8.14 а, рис. 8.15 а и рис. 8.16 а показано три последовательных характерных положения якоря относительно полюсов. Рис. 8.14 б, рис. 8.15 б и рис. 8.16 б, соответственно, условно показывают расположение секций якорной обмотки относительно щеток в этих положениях, а на рис. 8.14 в, рис. 8.15 в и рис. 8.16 в представлены эквивалентные электрические схемы якорной обмотки в этих же положениях якоря.
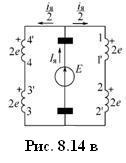
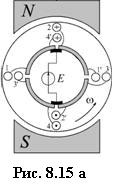
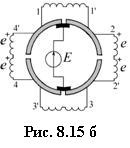
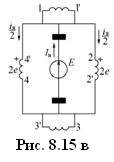


Как видно из рис. 8.15,а,б,в, в процессе перехода секций 1 и 3 из одной параллельной ветви в другую в течении некоторого интервала времени они оказываются закороченными через щетки (также, как и секция 2 на рис. 8.13,б). Чтобы короткое замыкание секций не вызывало чрезмерного увеличения тока в них, щетки стремятся располагать около геометрической нейтрали (на одинаковом расстоянии между соседними полюсами). В этом случае ЭДС, наводимая в секции при ее замыкании, минимальна. Однако, даже в этом случае в короткозамкнутой секции под действием этой ЭДС могут возникать чрезмерные токи, приводящие к искрению под щетками. Это ограничивает работоспособность щеточно-коллекторного узла. Наиболее опасен круговой огонь, охватывающий весь коллектор. Это приводит к оплавлению коллектора и выходу машины из строя.
Обратим внимание также на то, что в момент замыкания секции через щетку накоротко уменьшается суммарная ЭДС параллельных ветвей. Так в рассматриваемом выше примере МПТ с четырехсекционным якорем при его вращении ЭДС периодически уменьшается в два раза. В результате возникают пульсации мгновенной ЭДС якоря. Очевидно, амплитуда этих пульсаций снижается, а частота, наоборот, возрастает по мере увеличения числа секций якорной обмотки. Поскольку реально число секций якорной обмотки значительно больше четырех, поэтому пульсациями ЭДС, тока и т.п. вызванными коммутацией тока в якорной обмотке, обычно пренебрегают.
Для улучшения условий коммутации МПТ используются дополнительные полюса 4 на рис. 8.12 с соответствующей обмоткой, которые располагаются между главными полюсами. Поле, создаваемое дополнительными полюсами, снижает интенсивность поля в зоне коммутации, в результате чего снижается уровень наводимой в коммутируемой секции ЭДС и улучшается работа коллектора. Для этого за главным полюсом данной полярности по направлению вращения МПТ в режиме генератора должен следовать добавочный полюс противоположной полярности, а в режиме двигателя – добавочный полюс той же полярности. Обмотка дополнительных полюсов включается последовательно с якорной обмоткой. В качестве дополнительных средств улучшения коммутации могут использоваться укорочение шага якорной обмотки, сдвиг щеток с геометрической нейтрали, а также применение щеток со специальными характеристиками.
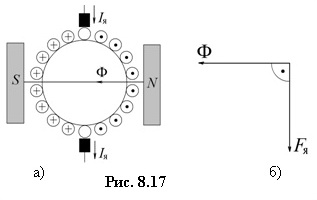
На рис. 8.12 показана МПТ с одной парой полюсов. В зависимости от мощности и назначения МПТ может иметь несколько пар главных полюсов. Тогда, соответственно, увеличивается количество дополнительных полюсов и щеток. Щетки всегда устанавливают таким образом, чтобы МДС обмотки якоря Fя действовала в направлении, перпендикулярном оси поля возбуждения (рис 8.17,а). Это положение щеток позволяет получить наибольший момент. Машина постоянного тока наглядно иллюстрирует принцип взаимно - перпендикулярных полей. Если рассматривать машину с точки зрения неподвижного наблюдателя, то главные полюса также неподвижны. В пространстве между ними находятся полюса от тока якоря, создающие перпендикулярное поле. Угол относительного смещения полей называется углом момента. В идеализированной МПТ он равен 90°, как это показано на векторной диаграмме на рис. 8.17,б.
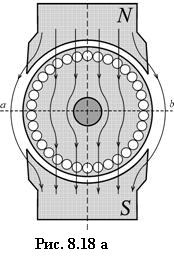
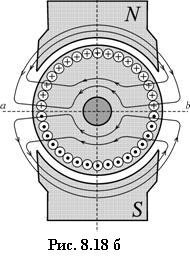
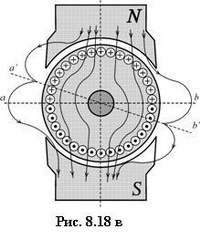
Необходимо однако отметить, что реально результирующий магнитный поток в воздушном зазоре МПТ создается не только главными полюсами, но и якорной обмоткой. На рис. 8.18,а и рис. 8.18,б условно показаны пути замыкания магнитных потоков, создаваемых в отдельности главными полюсами и якорной обмоткой, соответственно. Полярность полюсов и направления токов якоря показаны для случая вращения якоря в направлении по часовой стрелке в генераторном режиме и против часовой – в двигательном режиме работы машины. Взаимодействуя, поля якоря и возбуждения создают результирующее поле, характер которого условно показан на рис. 8.18,в. Как видно, под действием поля якоря результирующее поле изменяется, в результате чего ось симметрии результирующего поля a’b’ смещается на некоторый угол по отношению к оси симметрии машины ab. Влияние поля якоря на результирующее поле МПТ называется реакцией якоря. При расположении щеток на геометрической нейтрали (на линии ab) реакция якоря поперечная, поскольку ось поля якоря перпендикулярна оси основного поля.
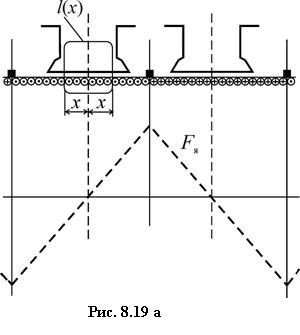
Для пояснения влияния реакции якоря на свойства МПТ рассмотрим это явление подробнее. Распределение поля в воздушном зазоре машины от тока якоря можно определить, рассмотрев упрощенный фрагмент линейной развертки её поперечного сечения с указанием направлений токов в обмотках якоря, как показано на рис. 8.19,а. На основании закона Ампера для любого замкнутого контура l(x), охватывающего проводники с током, имеем:
где x – текущая линейная координата.
В простейшем случае при бесконечно большой магнитной проницаемости магнитопровода можно считать, что в любой точке воздушного зазора левая часть интеграла в (8.16) равна произведению радиального размера зазора ld на напряженность магнитного поля в воздушном зазоре Hd. Правая же часть выражения (8.16) для различных контуров интегрирования, зависит от количества проводников, находящихся внутри контура интегрирования. При линейном распределении проводников по поверхности якоря число проводников, приходящееся на единицу длины окружности якоря, называемое обычно линейной нагрузкой, можно определить как:
где Ia – ток в проводниках, N – число проводников, D – диаметр якоря. Если поместить начало отсчета на ось симметрии полюса (см. рис. 8.19), МДС от тока якоря в точке, расположенной на расстоянии x от начала отсчета, может быть определена как:

Как видно, при достаточно большом числе проводников якорной обмотки можно считать, что создаваемая ею МДС вдоль окружности якоря распределена линейно. При этом максимум МДС приходится на геометрическую нейтраль, где установлены щетки.
 |
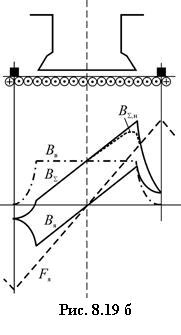 |
Примерное распределение индукции от якорной обмотки Вя показано на рис. 8.19,б. Заметим, что кривая Вя практически повторяет по форме Fя за исключением межполюсных промежутков, где ее снижение есть следствие увеличения воздушного зазора. С учетом распределения магнитной индукции поля возбуждения Вв, картина распределения результирующей индукции в зазоре машины ВΣ наиболее просто находится при отсутствии насыщения – суммированием ординат кривых Вя и Вв (см. рис. 8.19,б). Как видно, при нагрузке происходит искажение магнитного поля по отношению к режиму холостого хода. Под одним краем полюса оно ослабляется, под другим усиливается. В режиме генератора ослабление поля происходит на набегающем крае полюса, а усиление на сбегающем. В двигательном режиме картина обратная.
В идеальном случае без учета насыщения усиление и ослабление поля происходят в одинаковой степени, в результате чего магнитный поток сохраняет то же значение, что и при холостом ходе. Реально магнитная система насыщена. Более насыщена часть полюса с большей индукцией. Поскольку с насыщением магнитное сопротивление возрастает, результирующая индукция BΣ,н под этой частью полюса оказывается меньше суммы индукций полей возбуждения Вв и якоря Вя (см. рис. 8.20). В результате ослабление поля проявляется сильнее, чем усиление. Поэтому в насыщенной машине реакция якоря является размагничивающей. Это отрицательно сказывается на характеристиках машины.
Из рис. 8.19 также следует, что точки, где кривая индукции BΣ проходит через ноль смещаются относительно геометрической нейтрали, определяя положение так называемой физической нейтрали. В генераторном режиме физическая нейтраль смещается относительно геометрической нейтрали в сторону вращения якоря, в двигательном режиме – в противоположную сторону. Для снижения проявления поперечной реакции якоря служит специальная компенсационная обмотка, включаемая как и обмотка дополнительных полюсов последовательно с якорной обмоткой. Поток, создаваемый ею, направлен встречно потоку якоря и компенсирует его.
При сдвиге щеток с геометрической нейтрали в МПТ появляется продольная реакция якоря. Ее появление можно объяснить тем, что МДС якоря Fя в этом случае можно условно разложить на две составляющих: одна из которых направлена по геометрической нейтрали и образует поперечную реакцию якоря, а другая – по оси главных полюсов и есть продольная реакция якоря. В зависимости от направления сдвига щеток она может быть размагничивающей или намагничивающей, т.е. ослабляющей или усиливающей поле возбуждения. Тем не менее, в подавляющем числе случаев можно считать, что входящий в выражения (8.10) и (8.14) поток Ф создается только обмоткой возбуждения, т.е. реакция якоря не проявляется, а коммутация секций якорной обмотки происходит мгновенно.
Также необходимо иметь в виду, что при зубчатой конструкции магнитопровода якоря из-за экранирующего действия зубцов внешнее поле в области пазов с проводниками обмотки якоря резко ослаблено и большая часть магнитного потока, создаваемого полюсами, замыкается через зубцы, как это условно показано на рис. 8.20. Поэтому реально развиваемый электромагнитный момент имеет две составляющие. Причем только меньшая его часть возникает непосредственно в результате взаимодействия тока якоря и магнитного потока. Большая же часть электромагнитного момента есть результат взаимодействия полей от обмотки якоря и обмотки возбуждения и приложена к боковым поверхностям зубцов. Заметим, что эта же особенность справедлива для всех индуктивных электрических машин, проводники в которых расположены в пазах. Тем не менее, в сумме эти две составляющие образуют результирующий момент, значение которого для МПТ определяется в соответствии с выражением (8.14).
Из сказанного следует, что отмеченные выше особенности реальных конструкций и работы МПТ не изменяют общего вида выражений для ЭДС (8.10) и электромагнитного момента (8.14), полученных для ее простейшей модели. Они отражаются только на коэффициенте пропорциональности k, входящем в выражения для ЭДС (8.10) и электромагнитного момента (8.14). При числе активных проводников обмотки N, числе параллельных ветвей a и числе пар главных полюсов р общее выражение для этого коэффициента имеет вид:
Как видно, он выражается через конструктивные параметры МПТ, поэтому его обычно называют конструктивным коэффициентом.
Свойства МПТ в значительной степени зависят от суммарного сопротивления якорной цепи Rя. Из изложенного выше следует, что оно обуславливается в общем случае сопротивлениями трех обмоток – якорной, компенсационной и дополнительных полюсов. В нем также обычно учитывают переходное сопротивление щеточно-коллекторного узла. В общепромышленных МПТ обычного исполнения суммарное сопротивление якорной цепи Rя невелико, как правило, менее одного Ома. Причем, оно тем меньше, чем больше мощность машины.
8.3. Характеристики МПТ при различных способах возбуждения.
Один из важнейших признаков классификации МПТ, который коренным образом влияет на их свойства – способ соединения электрических цепей якорной обмотки и обмотки возбуждения. Различают МПТ с независимым (параллельным), последовательным и смешанным возбуждением. Это соответствующим образом отображается на их схемах замещения.
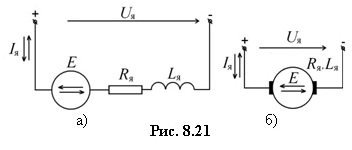
В наиболее общем случае якорная цепь МПТ на схеме замещения может быть представлена тремя последовательно соединенными элементами: источником ЭДС Е, активным сопротивлением Rя и индуктивностью якорной обмотки Lя (рис. 8.21,а). Однако наиболее часто якорную обмотку изображают, как показано на рис. 8.21,б. При этом взаимные направления ЭДС и тока могут быть разными и зависят от режима работы МПТ. Обмотка возбуждения обычно представляется катушкой индуктивности.
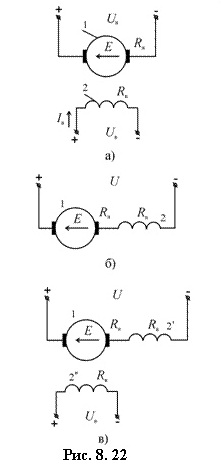
У машин с независимым возбуждением (рис. 8.22,а) обмотка якоря 1 и обмотка возбуждения 2 электрически не связаны между собой и питаются от разных источников питания Uя и Uв, соответственно. Как правило, напряжение Uя, к которому подключается якорная обмотка, больше, чем напряжение обмотки возбуждения Uв. Это характерно для электрических машин средней и большой мощности.
Электрические машины относительно небольшой мощности обычно изготавливают на одинаковые напряжения якоря и возбуждения. В этом случае обмотки якоря и возбуждения соединяют между собой параллельно и подключают к общему источнику питания. Такие МПТ называют машинами параллельного возбуждения. Если мощность источника питания значительно превышает мощность электрической машины, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие машины являются частным случаем МПТ независимого возбуждения, т.к. свойства их одинаковы.
В машинах последовательного возбуждения (рис. 8.22,б) якорная обмотка 1 и обмотка возбуждения 2 соединены последовательно и питаются от одного источника питания напряжением U. Машины смешанного возбуждения (рис. 8.22,в) являются как бы комбинацией предыдущих. В них обмотка возбуждения разделена на две части, т.е. выполняется из двух полуобмоток. Одна из которых, например, 2’ включается последовательно с якорной обмоткой, а другая 2”- параллельно якорю или к дополнительному источнику питания Uв.
Следует заметить, что ток в обмотках независимого или параллельного возбуждения, как провило, минимум на порядок меньше тока в якорной обмотке. Это обуславливает конструктивную особенность таких обмоток возбуждения – они выполняются многовитковыми из относительно тонкого провода. Наоборот, ток в обмотках последовательного возбуждения и ток якоря одинаков. Поэтому такие обмотки возбуждения выполняют относительно толстым проводом с меньшим числом витков.
8.3.1. МПТ с независимым возбуждением.
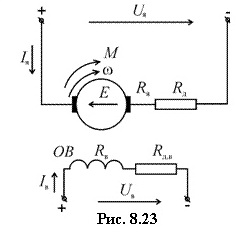
Анализ проведем для двигательного режима работы МПТ. Пусть к якорной обмотке и обмотке возбуждения приложены неизменные напряжения Uя и Uв. Тогда при постоянной скорости вращения якоря наводимая ЭДС Е и, соответственно, ток якоря Iя можно считать также практически постоянными, как это видно из рис. 8.9. Это дает основание не учитывать влияние индуктивности якорной обмотки на происходящие в ней процессы. При этом в общем случае последовательно с якорной обмоткой и обмоткой возбуждения могут быть включены дополнительные резисторы Rд и Rд.в. Их назначение будет пояснено далее. Взаимные направления напряжения на якоре Uя, тока Iя и ЭДС движения Е для этого режима работы показаны на рис. 8.23.
Если принять, что результирующий магнитный поток не зависит от нагрузки (реакция якоря не проявляется), то в соответствии со вторым законом Кирхгофа можно записать

где RяΣ - полное сопротивление якорной цепи двигателя, включая сопротивление дополнительного резистора Rд.
Подставив в (8.20) выражение для ЭДС из (8.10) и решив полученное уравнение относительно скорости ω, получим

Уравнение (8.21) отражает аналитическую связь между двумя переменными: электрической величиной – током якоря Iя и механической величиной – скоростью ω. В электроприводе такие зависимости получили название электромеханических или скоростных характеристик.
Подстановка в (8.21) выражения для тока якоря из (8.14) позволяет установить связь между двумя механическими величинами: моментом М и скоростью ω

Такие характеристики также широко распространены в электроприводе и получили название механических характеристик. Следует заметить, что поскольку в выражения (8.21) и (8.22) не входят производные переменных, их называют статическими характеристиками. Как видно из (8.21) и (8.22), при неизменных U, Ф, RяΣ характеристики ω(Iя) и ω(M) – прямые линии.
Отметим характерные точки электромеханической и механической характеристик. Их положение можно определить координатами пересечения соответствующих графиков с осями координат. Скорость, при которой ток якоря и электромагнитный момент равны нулю, называют скоростью идеального холостого хода и обозначают ω0. Она равна
Соответственно, режим работы МПТ, при котором она работает со скоростью ω0 называют режимом идеального холостого хода. В этом режиме ЭДС движения Е направлена навстречу приложенному напряжению U и полностью его уравновешивает.
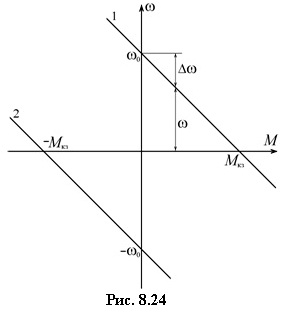
Заметим, что, если второй член в правой части уравнения (8.22), характеризующий собой статическое падение угловой скорости двигателя относительно скорости идеального холостого хода, обозначить через Δω, т.е.
то уравнение механической характеристики может быть записано в виде

При скорости равной нулю получаем режим короткого замыкания, в котором ЭДС движения в соответствии с (8.10) также равна нулю, а ток якоря Iя равен току короткого замыкания
Поскольку, как уже отмечалось, сопротивление якоря Rя обычно мало, этот режим при отсутствии Rд сопровождается значительным увеличением тока якоря. Вся электрическая энергия, потребляемая из сети, преобразуется МПТ в тепловую энергию, выделяемую в ее якорной цепи. Если не принять соответствующих мер, это может привести к нарушению нормальной работы МПТ. Как видно из (8.26), ограничить ток якоря в этом режиме можно включением последовательно с якорем дополнительного резистора необходимой величины Rд, либо снизив напряжение Uя. Этому режиму соответствует электромагнитный момент короткого замыкания

Характеристики ω(M), построенные по (8.22) при прямом и обратном знаках приложенного напряжения Uя, показаны на рис. 8.24 (характеристики 1 и 2). В соответствии с (8.23) и (8.27) абсолютные значения скорости идеального холостого хода |ω0| и момента короткого замыкания |Mкз| при этом не изменяются, поэтому характеристики расположены симметрично относительно начала координат. Как видно из (8.14), при постоянном потоке момент и ток якоря связаны линейно. Поэтому графическое изображение электромеханической характеристики ω(Iя) отличается от графика механической характеристики ω(M) лишь изменением масштаба по оси абсцисс. Участки этих характеристик при одинаковых знаках ω и M соответствуют двигательному режиму работы МПТ, а при разных знаках – тормозной режим.
8.3.2. МПТ с последовательным возбуждением.
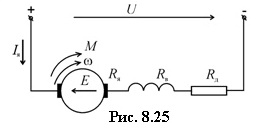
Обычная схема включения МПТ последовательного возбуждения показана на рис. 8.25, на котором взаимные направления напряжения источника питания U, ЭДС движения Е и тока Iя соответствуют двигательному режиму работы. Поскольку обмотки якоря и возбуждения соединены последовательно и по ним протекает один и тот же ток Iя, поток Ф изменяется с изменением якорного тока, т.е. поток является функцией якорного тока, т.е. Ф(Iя). При этом, уравнения электромеханической и механической характеристик имеют тот же вид, что и для МПТ независимого возбуждения


Однако следует иметь в виду, что в сопротивление якорной цепи RяΣ входит также сопротивление обмотки возбуждения Rв, а зависимость Ф(Iя), называемая кривой намагничивания, нелинейна и не имеет простого аналитического выражения (см. главу 1). Поэтому уравнения (8.28) и (8.29) непосредственно не позволяют установить характер зависимости между скоростью и током и скоростью и моментом, т.е вид электромеханических и механических характеристик. В первом приближении эти зависимости для установившегося режима работы МПТ можно получить, если пренебречь насыщением, т.е. принять, что поток и ток якоря связаны линейной зависимостью:

где α – коэффициент пропорциональности между током и потоком.
Подставив в (8.28) выражение для потока из (8.30), получаем приближенное уравнение для электромеханической характеристики
С учетом того, что в данном случае момент и ток связаны зависимостью

находим уравнение механической характеристики
где:
Таким образом, даже при сделанном допущении из (8.31) и (8.33) следует, что электромеханическая и механическая характеристики нелинейны и представляют собой гиперболические зависимости. Одной из асимптот для обеих зависимостей является ось ординат, а другой асимптотой – прямая, параллельная оси абсцисс, уравнение которой для имеет вид:

Следует особо отметить, что полученные уравнения являются идеализированными и дают лишь самое общее представление о характеристиках МПТ последовательного возбуждения. В частности, из уравнений (8.31) и (8.33), видно, что отличительной особенностью характеристик этой машины является отсутствие точки идеального холостого хода. При снижении момента и тока снижается магнитный поток и скорость существенно возрастает, теоретически стремясь к бесконечности. Однако, реально она ограничена на некотором максимальном уровне из-за наличия остаточного потока намагничивания Фост. Наличие остаточного потока определяет величину скорости идеального холостого хода
Тем не менее, если учесть, что обычно Фост не превышает (2 – 9)% от номинального значения потока, значение ω0 может в десятки раз превышать номинальную скорость двигателя. С учетом того, что такие значения скорости недопустимы по условиям прочности механической конструкции двигателя, оказывается, что реально режим идеального холостого хода двигателя находится далеко за пределами его рабочей зоны.
Кроме того, в действительности магнитная система машины насыщена и кривая намагничивания далека от прямой. Соответственно, реальные характеристики заметно отличаются от кривых, получаемых согласно уравнениям (8.31) и (8.33).
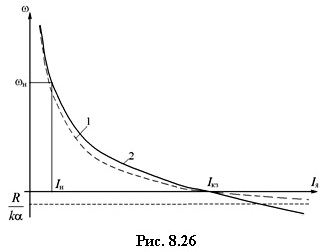
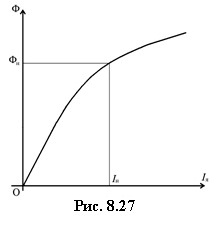
В качестве примера сопоставим идеализированную электромеханическую характеристику (кривая 1 на рис. 8.26) с реальной (кривая 2 на рис. 8.26). Номинальный ток возбуждения Iн, равный якорному току, соответствует примерно колену кривой намагничивания Ф(Iя) (см. рис. 8.27). Поэтому можно считать, что реальная электромеханическая характеристика близка к идеализированной только в области токов примерно Iя< 0.5Iн, поскольку в этой зоне практически линейная связь между током и потоком (см. рис. 8.27).
Реальная и идеализированная характеристики совпадают также в точке короткого замыкания (Iя = Iкз), т.к. ее положение не зависит от потока. Для определения положения реальной характеристики в областях 0.5Iн < Iя < Iкз и Iя > Iкз перепишем выражение (8.32) в виде:

Как видно из рис. 8.27, по мере насыщения магнитной системы двигателя при увеличении тока Iя замедляется темп увеличения потока Ф. Поэтому коэффициент пропорциональности α между током и потоком в выражении (8.31) не остается постоянным, как было принято для идеализированной характеристики, а снижается по мере роста тока. Отсюда следует, что до тех пор, пока U/Iя > RяΣ скорость ω>0 и реальная характеристика располагается выше идеализированной, а при U/Iя < RяΣ скорость ω< 0 и реальная характеристика лежит ниже идеализированной.
Заметим также, что при Iя > Iн реальная характеристика близка к прямой, т.к. здесь увеличение потока с ростом тока практически полностью компенсируется реакцией якоря и поток почти не изменяется. Таким образом, можно считать, что на линейном участке кривых намагничивания электромагнитный момент пропорционален квадрату тока, как это и представлено в (8.33), а при насыщении эта зависимость вырождается в линейную.
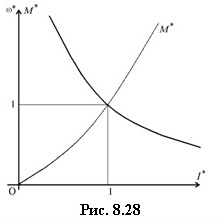
Вследствие отмеченных выше причин, для построения реальных характеристик МПТ последовательного возбуждения используют усредненные универсальные характеристики в относительных единицах ω*(Iя*) и M*(Iя*), приводимые в виде графиков в каталогах для соответствующих серий двигателей (базовыми приняты номинальные значения соответствующих величин, также приводимые в каталогах). Эти зависимости в виде, как показано на рис. 8.28, получены заводами – изготовителями двигателей в результате их испытаний. Установлено, что для широкого диапазона мощностей МПТ при переходе к относительным единицам в пределах одной серии машин эти зависимости практически совпадают, поэтому они в виде универсальных усредненных зависимостей для каждой серии МПТ последовательного возбуждения включаются в их паспортные данные.
Характеристики МПТ последовательного возбуждения обладают важными свойствами для подъемно-транспортных устройств – естественное снижение скорости по мере роста развиваемого момента (нагрузки). В первом приближении можно считать, что момент растет обратно пропорционально снижению скорости, в результате чего обеспечивается практически постоянство выходной мощности двигателя.
Также полезным для практики достоинством этих двигателей является повышенная перегрузочная способность. Поскольку несмотря на насыщение, рост тока ведет к увеличению магнитного потока, при перегрузке по току в (2-8.5) раза двигатель может развивать момент до (3-3.5) раз превышающий его номинальное значение. Однако применение этих двигателей нецелесообразно для механизмов, у которых возможен режим, близкий к холостому ходу. Как уже отмечалось, из-за снижения тока и, соответственно, потока скорость двигателя может стать недопустимо большой.
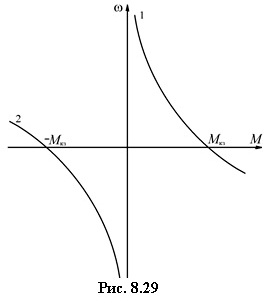
На рис. 8.29 показаны характеристики ω(M) двигателя последовательного возбуждения для прямого (кривая 1) и обратного (кривая 2) направлений вращения. Реверс двигателя осуществляется изменением полярности напряжения либо на обмотке якоря, либо на обмотке возбуждения. Как и на рис. 8.23, при одинаковых знаках момента и скорости – двигательный режим работы, при разных знаках – тормозные режимы.
8.3.3. МПТ со смешанным возбуждением.
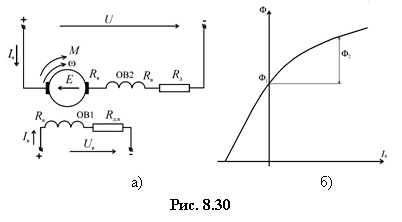
Обычная схема включения МПТ смешанного возбуждения показана на рис. 2.30,а. Магнитный поток в этой машине Ф можно представить в виде двух составляющих – Ф1 и Ф2

создаваемых, соответственно, обмоткой независимого возбуждения ОВ1 и обмоткой последовательного возбуждения ОВ8.
На рис. 8.30,б показана зависимость результирующего магнитного потока от тока, протекающего через якорную обмотку и обмотку последовательного возбуждения ОВ8. В двигательном режиме работы рассматриваемой МПТ потоки обеих обмоток возбуждения направлены согласно. С учетом того, что в данном случае, как и в МПТ последовательного возбуждения, поток является функцией якорного тока, для электромеханической и механической характеристик справедливы уравнения (8.29) и (8.30).
Однако, поскольку вид функциональной связи между током якоря и потоком в МПТ последовательного и смешанного возбуждения разный (сравните рис. 8.23 и рис. 8.27), то и, соответственно, вид их электромеханических и механических характеристик также отличается. Главное их отличие обусловлено тем, при снижении тока якоря до нуля МПТ смешанного возбуждения полностью не размагничивается, т.к. в этом случае поток в ней создается обмоткой независимого возбуждения. В соответствии с принятыми на рис. 8.29 обозначениями это обуславливает вполне определенное значение скорости идеального холостого хода
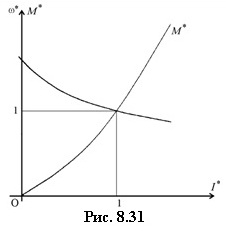
Нелинейная зависимость Ф(Iя) для этих машин также исключает возможность получения точных аналитических выражений для электромеханической и механической характеристик. Их обычно строят теми же методами, что и для МПТ последовательного возбуждения, используя приводимые в каталогах универсальные зависимости ω*(Iя*) и M*(Iя*). Примерный их вид показан на рис. 8.31.
Следует заметить, что реальные значения скорости идеального холостого хода у МПТ смешанного возбуждения обычно выше, чем у МПТ с независимым возбуждением, но ниже, чем у МПТ с последовательным возбуждением. По перегрузочной способности эти машины также занимают промежуточное положение между машинами независимого и последовательного возбуждения. При перегрузке по току в (2-8.5) раза двигатель может развивать момент до (8.5-3.0) раз превышающий номинальный момент.
8.4. Принцип действия и характеристики асинхронных машин.
8.4.1. Простейшая модель асинхронной машины.
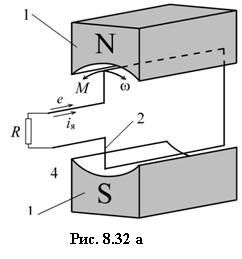
Наиболее простую модель фазы асинхронной машины (АМ) можно получить, взяв за основу поведение витка с током в магнитном поле, используемое ранее для объяснения работы МПТ (см. рис. 8.8). С общих позиций, для процесса электромеханического преобразования энергии наличие коллекторных пластин и щеток как у МПТ не является обязательным. Заменим коллекторный узел и последующую за ним электрическую цепь в простейшей модели МПТ (рис. 8.8) резистором R (рис. 8.32,а). Тогда при вращении якоря с угловой скоростью ω внешним источником механической мощности этот резистор будет вращаться вместе с якорем. При вращении якоря одновременно с изменением знака ЭДС е, наводимой в витке, будет изменяться знак тока iя, но их произведение p=eiя будет всегда положительным, следовательно, электрическая мощность p от вращающегося витка передается резистору R.
Обратим внимание на то, что как показано на рис. 8.32,а, развиваемый электромагнитный момент M в данном случае является тормозящим, т.е. он направлен встречно движению и уравновешивает момент внешних сил. Заметим также, что если на якоре расположено несколько катушек, то аналогичным образом можно каждую из них замкнуть на внешний резистор; процесс электромеханического преобразования энергии от этого принципиально не изменится. Однако, важно подчеркнуть, что при неподвижных полюсах данное устройство не может создавать движущий электромагнитный момент, т.е. момент, направленный согласно с направлением вращения якоря.
Для создания электромагнитного момента в направлении вращения якоря необходимо вращать полюса возбуждения, причем в ту же сторону, что и якорь, но с угловой скоростью ω0, превышающей угловую скорость вращения ротора ω (см. рис. 8.32,б). Тогда скорость вращения якоря относительно полюсов возбуждения изменяет знак, следовательно изменяется направление ЭДС в витке e, изменяется направление тока в нем iя и, следовательно, изменяется знак электромагнитного момента М, действующего на виток.
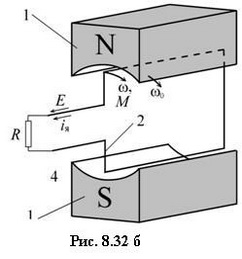
Полюса возбуждения в рассматриваемой модели должны вращаться моментом, величиной М со скоростью ω0, и, следовательно, им необходимо сообщить мощность:

Мощность Рэм, затрачиваемую на создание вращающегося магнитного поля, обычно называют электромагнитной мощностью.
Так как ротор вращается с меньшей скоростью ω он развивает механическую мощность:

Разность мощностей Рэм и Р2 идет на покрытие тепловых потерь в суммарном активном сопротивлении витка и внешнего резистора:

Поскольку величина Ps пропорциональна скольжению

она получила название мощности скольжения или потерь скольжения. Ее наличие является важной особенностью всех реальных асинхронных электрических машин.
Таким образом представленное на рис. 8.33 устройство, состоящее из полюсов возбуждения, между которыми находится замкнутый на внешнее сопротивление (либо накоротко) подвижный виток, причем полюса вращаются в ту же сторону, что и виток, но с большей скоростью, может рассматриваться как наиболее простая модель асинхронной машины в двигательном режиме ее работы. Все другие режимы работы рассматриваемой модели, в которых полюса возбуждения и якорь вращаются в разные стороны, либо вращаются в одну сторону, но скорость вращения якоря превышает скорость вращения полюсов соответствуют генераторному режиму работы АМ. Однако, в любом случае частота изменения тока в витке определяется скоростью вращения ротора относительно полюсов статора, поэтому она является функцией угловой скорости ротора, которая в свою очередь зависит от развиваемого электромагнитного момента.
Как видим, вращающийся виток в рассматриваемой модели не подключается к источнику питания и получает энергию в результате эффекта взаимной индукции от вращающихся полюсов. На этом же принципе, как известно, основана работа трансформатора. Поэтому в первом приближении АМ можно рассматривать как трансформатор, но с вращающейся вторичной обмоткой. В заключениии отметим, что в реальной АМ вращающиеся с угловой скоростью ??0 полюса создаются неподвижной в пространстве многофазной распределенной обмоткой статора, питаемой системой многофазных токов (см. раздел 8.1).
8.4.2. Особенности конструкции реальных асинхронных машин.
Асинхронные машины используются в основном как двигатели. Благодаря конструктивной простоте, низкой стоимости и высокой надежности при минимальном обслуживании они являются в настоящее время наиболее распространенным типом электрических машин и потребляют более 50% от всей вырабатываемой электрической энергии.
Появление первого промышленного образца асинхронного двигателя (АД) связано с именем русского электротехника М.О. Доливо-Добровольского (1891 г.). В настоящее время АД изготовляются для работы от однофазных, двухфазных и трехфазных источников питания, однако наибольшее распространение получили трехфазные АД. Магнитопроводы статора и ротора АД собираются из листов электротехнической стали. Перед сборкой листы изолируют друг от друга оксидированием или лакировкой. Магнитопровод статора закрепляется в корпусе, а магнитопровод ротора на валу. На внутренней цилиндрической поверхности статора и на внешней цилиндрической поверхности ротора расположены пазы, в которых размещаются проводники обмоток статора и ротора.
Обмотка статора состоит из трех идентичных частей – фаз, каждая из которых представляет собой систему из последовательно соединенных проводников, размещенных на каждом полюсном делении в нескольких рядом лежащих пазах. Наибольшее распространение в асинхронных машинах получили петлевые обмотки (см. рис. 8.13,а). Каждая фазная обмотка занимает на внутренней поверхности статора угловую зону в 120 градусов.
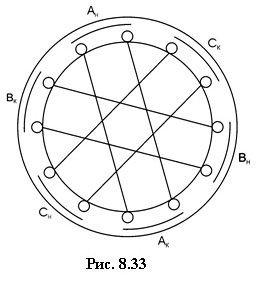
Если обозначить начала фазных обмоток Ан, Вн, Сн, а концы, соответственно, Ак, Вк, Ск , то принцип размещения фазных обмоток в двухполюсной машине можно условно представить, как на рис. 8.33. Окружность статора разбивается на шесть равных зон. Обмотки укладываются в следующей последовательности: Ан, Ск, Вн, Ак, Сн, Вк. В общем случае асинхронные двигатели могут выполняться не только с двумя, но и с четырьмя, шестью, восьмью и т.д. полюсами. Каждая фазная обмотка таких двигателей состоит из нескольких частей, которые между собой могут соединяться параллельно или последовательно. В машинах с числом пар полюсов p >2 указанная на рис. 8.30 разбивка повторяется на каждой паре полюсных делений. Фазные обмотки статора между собой могут соединяться в звезду или треугольник.
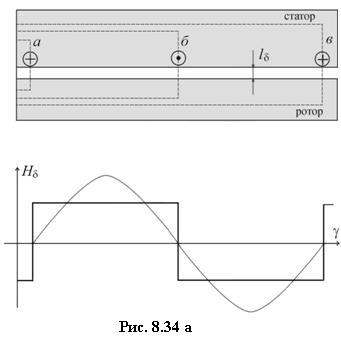
За счет размещения фазных обмоток в нескольких рядом лежащих пазах при протекании по ним тока обеспечивается близкий к синусоидальному закон распределения магнитного поля в воздушном зазоре машины. Это можно пояснить с помощью рис. 8.34,а и рис. 8.34,б, где условно представлены фрагменты линейной развертки поперечного сечения асинхронной машины при сосредоточенной и распределенной обмотках, соответственно, с указанием направлений токов в обмотках точками и крестиками по аналогии с тем, как это сделано ранее для машины постоянного тока (см. рис. 8.18 и рис. 8.19).
Приняв бесконечно большой магнитную проницаемость сердечников статора и ротора АД, можно считать, что в любой точке воздушного зазора на рис. 8.34,а и рис. 8.34,б левая часть уравнения (8.16) также равна произведению радиального размера зазора l? на напря-женность магнитного поля H?. Правая часть выражения (8.16) для различных контуров интегрирования, например, контуров а, б, в, на рис 8.34,а и рис. 8.34,б при любом значении фазного тока зависит от количества проводников, находящихся внутри каждого контура интегрирования.
 |
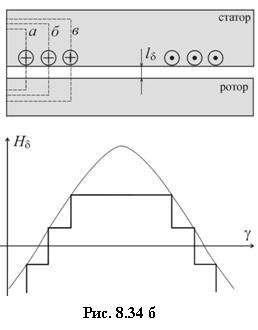 |
Тогда при сосредоточенной обмотке каждой фазы (верхняя часть рис. 8.34,а) распределение напряженности магнитного поля в воздушном зазоре машины H? в функции угловой координаты θ имеет прямоугольную форму, как это показано в нижней части рис. 8.34,а (толстая линия). Такая форма кривой достаточно далека от синусоидальной (тонкая линия на этом же рисунке). Если же каждая фазная обмотка состоит из q пространственно смещенных проводников, то при соответствующих контурах интегрирования легко установить, что распределение H? при оговоренных условиях представляется ступенчатой линией. В частности, при q =3 изменение H? в воздушном зазоре машины можно представить, как показано в нижней части рис. 8.34,б (толстая линия).
При достаточно большом числе проводников и соответствующем их пространствен-ном распределении (используя необходимое укорочение шага обмотки) удается добиться практически синусоидального распределения МДС в воздушном зазоре (сравните рис. 8.34,а и рис. 8.34,б). При общем числе пазов на статоре z и числе пар полюсов p число пазов на полюс и фазу определяется как:
Обычно q = 2…6.
Синусоидально распределенная в пространстве МДС каждой фазы, как уже отмечалось, неподвижна в пространстве и пульсирует во времени. Ее амплитуда ориентирована по оси фазы и пульсирует с частотой протекающего тока. Однако питание пространственно рас-пределенных трехфазных обмоток трехфазной системой токов приводит к вращению синусоидально распределенной МДС относительно создающей его статорной обмотки в направлении, определяемом чередованием фаз. При незначительном насыщении магнитной системы двигателя распределение индукции в воздушном зазоре также близко к синусоидальному.
Необходимо также отметить, что наличие зубцов и пазов на внутренней поверхности статора приводит к появлению высокочастотной составляющей в кривой магнитного поля. Эффективной мерой по ее снижению является применение скоса пазов.
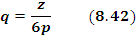
Роторы АД выполняют двух видов: с короткозамкнутой обмоткой и с фазной обмоткой. Соответственно с выполнением ротора, различают асинхронные двигатели с короткозамкнутым ротором и с фазным ротором, которые иногда также называют двигателями с контактными кольцами. Значительно большее распространение получили АД с короткозамкнутым ротором (рис. 8.35,а и рис. 8.35,б). В них обмотка ротора 1 состоит из стержней, располагаемых в пазах, и замыкающих их колец 8. Она выполняется путем заливки расплавленного алюминиевого сплава в пазы ротора. Одновременно с этим с обоих торцов ротора отливают кольца 2, замыкающие стержни. Для улучшения формы кривой индуцируемой в роторе ЭДС пазы и, соответственно, стержни обычно выполняют скошенными (см. рис. 8.25,б).
Короткозамкнутые роторы крупных машин и специальных асинхронных машин с улучшенными пусковыми свойствами выполняются сварными. Стержни ротора из меди или латуни, размещенные в пазах ротора, привариваются к короткозамыкающим кольцам. Без сердечника обмотка короткозамкнутого ротора внешне напоминает беличью клетку, поэтому двигатели такого типа иногда называют также двигателями с беличьей клеткой. В электрическом отношении такая обмотка является многофазной с числом фаз, равным числу стержней. Внешний вид асинхронного двигателя с к.з. ротором производства всемирно известной фирмы АВВ показан на рис. 8.35,в.
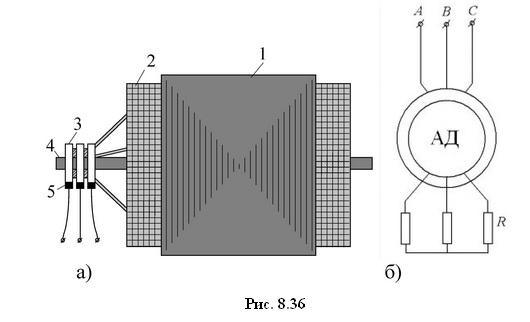
В двигателях с фазным ротором (рис. 8.36,а) в пазы ротора 1 укладывают трехфазную обмотку 2 из медного провода аналогично обмотке статора. Обмотку соединяют в звезду, а три вывода ее (по числу фаз) соединяют с медными контактными кольцами 3, расположенными на валу 4. Совместно с неподвижными графитовыми щетками 5 они обеспечивают скользящий контакт вращающейся обмотки ротора с внешней цепью, которую чаще всего образуют пусковые или регулировочные резисторы либо другие элементы.
Заметим, что АД с обоими типами роторов часто на электрических схемах изображают в виде концентрических окружностей. При этом, на отходящих отводах от внешней окружности, условно изображающей статор, показывают клеммы для подключения к источнику питания, а на отводах от внутренней окружности – ротора у АД с фазным ротором могут изображаться, например, дополнительные резисторы, как показано на рис. 8.36,б.
Воздушный зазор между статором и ротором у асинхронных двигателей выбирают минимально возможным с учетом конструктивных и технологических ограничений. В машинах небольшой и средней мощности он обычно составляет доли миллиметра, а у более крупных машин – миллиметры.
8.4.3. Основные соотношения для асинхронного двигателя.
Уравнения, описывающие рабочий процесс АД, как обычно, будем записывать относительно действующих значений синусоидально изменяющихся величин (токов, напряжений и т.п.), которые в дальнейшем обозначены соответствующими заглавными буквами. При необходимости использования векторной формы записи уравнений соответствующие величины помечены точкой сверху.
Синхронная скорость, ЭДС статора и ротора. При подключении фазных обмоток статора к трехфазному источнику питания с фазным напряжением U1 и частотой f1 в них протекает ток I1, создающий магнитный поток Ф1. Угловая скорость вращения магнитного потока Ф1 относительно статорной обмотки с числом пар полюсов p определяет его синхронную скорость вращения:
Из выражения (8.43) следует, что при заданной частоте f1 синхронная скорость ω0 однозначно определяется числом пар полюсов магнитного поля p. С учетом связи между угловой скоростью ω0 и частотой вращения n0 в об/мин – ω0= πn0/30 можно получить удобное для практики соотношение:
В частности, при питании двигателей с разным числом пар полюсов от промышленной сети частотой f1= 50 Гц из (8.44) следует стандартный ряд синхронных частот вращения асинхронных двигателей общего назначения: n0=3000, 1500, 1000, 750, 600, 500 об/мин.
При скорости вращения ротора ω скорость его перемещения относительно магнитного поля статора (ω0 – ω) связана с частотой f2 индуцируемой в роторе ЭДС, соотношением, аналогичным соотношению (8.43):
Поэтому частота f2 определяется через частоту f1 и скорость ω или скольжение s следующим образом:

Под действием ЭДС, индуцируемой в замкнутой обмотке ротора, течет ток I2, создающий магнитный поток Ф8. Потоки Ф1 и Ф2 вращаются синхронно (с одинаковой угловой скоростью ω0 относительно статора) и образуют общий вращающийся магнитный поток Ф = Ф1 + Ф2. Необходимо подчеркнуть, что потоки Ф1 и Ф2 по отдельности в действительности не существуют и разделение результирующего потока Ф на составляющие является чисто условным. Поэтому магнитное состояние машины и степень насыщения ее магнитной цепи определяются значением результирующего потока Ф.
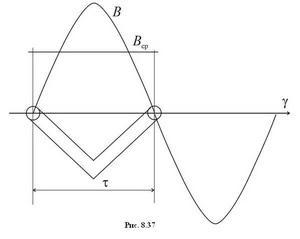
Магнитный поток Ф, распределенный в пространстве по синусоидальному закону, перемещается относительно статорной обмотки, в результате чего в ней наводится ЭДС движения, изменяющаяся также по синусоидальному закону. Если в пределах полюсного деления ω синусоидально распределенную индукцию B заменить средним значением Вср (см. рис. 8.37), то среднее значение ЭДС, наводимой в одном витке статорной обмотки при диаметральном шаге, можно определить по соотношению, аналогичному (8.7). Учитывая, что скорость вращения поля относительно витка статорной обмотки равна

а среднее значение магнитного потока в пределах полюсного деления

определяется как

из (8.7) получаем, что среднее значение наводимой в витке ЭДС равно:

где ν = πf1D. Выразим Е’1,ср через действующее значение Е’1. При синусоидальном изменении ЭДС, как известно, справедливо соотношение
с учетом которого получаем:

При определении ЭДС фазы Е1 с числом витков ω1 необходимо учесть взаимное пространственное смещение ЭДС катушек, вызванных пространственным распределением обмотки (см. рис. 8.35,б). Исходя из этого, ЭДС катушек суммируются геометрически и результирующая ЭДС оказывается меньше их алгебраической суммы. В общем виде количественно этот факт учитывается введением в соответствующие соотношения обмоточного коэффициента обмотки kобм,1, значение которого обычно изменяется от 0,91 до 0,95. С учетом этого, окончательное выражение для ЭДС статорной обмотки имеет вид:

Аналогично ЭДС, наводимая в фазах роторной обмотки Е2, определяется как:

где, ω2, kобм,2 – число витков и обмоточный коэффициент обмотки ротора, соответственно.
Из (8.50) с учетом (8.46) можно получить связь индуцируемой в роторе ЭДС со скоростью вращения ротора или скольжением

где

это ЭДС, наводимая в неподвижном роторе.
Схема замещения фазы асинхронного двигателя. Для анализа режимов работы и характеристик АД широко используются его схемы замещения – электрические схемы с определенным образом соединенными активными и реактивными элементами, отражающие основные связи между параметрами и переменными асинхронного двигателя. При этом, поскольку в симметричном двигателе параметры всех фаз одинаковы, анализировать можно схему замещения только одной фазы.
Наиболее простая схема замещения фазы АД получается, когда ротор вращается со скоростью вращения поля ω0. Тогда в проводниках ротора не наводится ЭДС и не течет ток, поэтому он не оказывает влияния на процессы в АД. Без учета активного сопротивления статорной обмотки прикладываемое к ней напряжение U1 уравновешивается только наводимой ЭДС Е1, определяемой по (8.49). Из этого соотношения может быть найден магнитный поток Ф1 или с учетом числа витков ω1 потокосцепление фазы ω1 = Ф1w1, которые по известным магнитным характеристикам машины Ф1(I1) или ω1(I1) позволяют определить потребляемый фазой ток I1. Поскольку в данном случае ток I1 идет лишь на создание магнитного поля, его называют током намагничивания и обозначают I0. Соотношение между ω1 и I0 определяет индуктивность контура намагничивания АД:
и реактивное сопротивление

В результате, вектор ЭДС статорной обмотки (E1) через параметры контура намагничивания определяется как

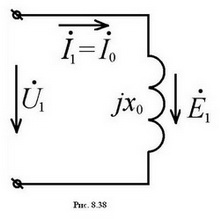
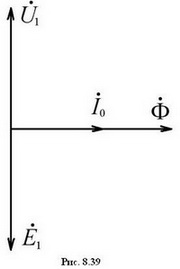
Таким образом, в простейшем случае фаза статорной обмотки АД может быть представлена схемой замещения, содержащей лишь одно реактивное сопротивление x0 (рис. 8.38). Ей соответствует векторная диаграмма, показанная на рис. 8.39.
 |
 |
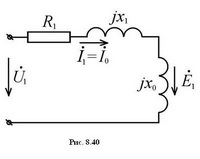
Более точная схема замещения фазы статорной обмотки АД учитывает ее активное сопротивление R1 и то, что в реальном двигателе магнитный поток Ф1, создаваемый обмоткой статора, имеет две составляющих: основной поток Ф10, замыкающийся по магнитопроводу и сцепленный с проводниками обмоток статора и ротора, и поток рассеяния Ф1р, замыкающийся частично по воздуху и сцепленный только с проводниками обмотки статора. Поток Ф1р и вызвавший его ток статора I1 связаны через коэффициент пропорциональности – индуктивность статорной обмотки L1, обусловленную потоком рассеяния.
Через нее определяется реактивное сопротивление обмотки статора, обусловленное потоком рассеяния

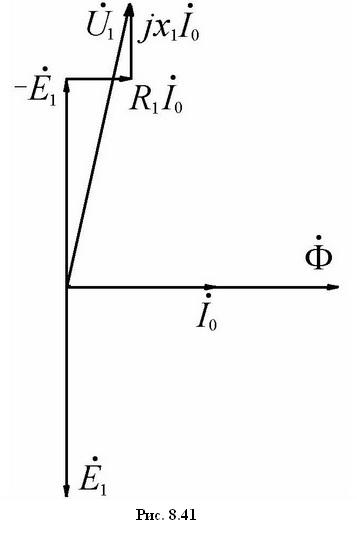
Уточненная схема замещения фазы статорной обмотки АД показана на рис. 8.40, а векторная диаграмма, соответствующая ей – на рис. 8.41.
 |
 |
При необходимости потери на перемагничивание магнитопровода в схеме замещения учитывают введением в нее дополнительного сопротивления R0, включаемого последовательно с x0.
При скорости вращения ротора ω < ω0 в нем наводится ЭДС Е2 и течет ток I2, оказывающий совместно с током I1 влияние на процессы в двигателе. Поскольку в асинхронном двигателе цепи обмоток статора и ротора не имеют гальванической связи, в наиболее общем виде cхема замещения его фазы представляется в виде отдельных схем для статорной и роторной цепей. При этом схема замещения статорной цепи не будет отличаться от схемы на рис. 8.40, но протекающий через ее элементы ток I1 уже не является только током намагничивания I0, поскольку лишь часть потребляемой от источника питания энергии идет на создание поля, а другая ее часть посредством электромагнитного поля передается в роторную цепь.
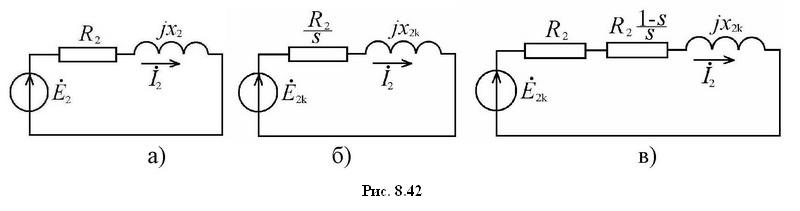
Процессы в роторной цепи отражает схема, показанная на рис. 8.42,а. Ее элементами являются активное сопротивление фазной обмотки ротора R2, реактивное сопротивление роторной обмотки, обусловленное потоком рассеяния x2 и источник ЭДС Е2, под действием которого протекает ток ротора I2. Появление x2 на схеме замещения роторной обмотки обусловлено теми же процессами, что и x1 в схеме статора, т.к. реально только составляющая Ф20 магнитного потока Ф2, создаваемого обмоткой ротора, сцеплена с проводниками статорной и роторной обмоток, а другая его составляющая Ф2р сцеплена только с проводниками обмотки ротора. Поэтому индуктивность обмотки ротора, обусловленная потоком рассеяния определяется аналогично (8.55)
Соответственно, реактивное сопротивление обмотки ротора, обусловленное потоком рассеяния, равно

При подстановке в (8.58) частоты f2 из (8.42) получаем, что также, как и Е2, величина x2 пропорциональна скольжению

где x2k =2πf1L2 – индуктивное сопротивление обмотки ротора при неподвижном роторе. Перемещение обмотки ротора относительно обмотки статора в схеме на рис. 8.42,а учитывается зависимостью электродвижущей силы Е2 и реактивного сопротивления x2 от скольжения s как это следует из (8.51) и (8.59).
Важно подчеркнуть, что в схемах замещения, показанных на рис. 8.40 и рис. 8.42,а частоты изменения наводимых ЭДС и токов не равны. По этой причине, в частности, невозможно изображение электрических величин статора и ротора на единой векторной диаграмме. Поэтому обычно параметры рабочего процесса асинхронной машины при вращающемся роторе приводят к параметрам при неподвижном роторе, когда частоты ЭДС и токов в статоре и роторе одинаковы. В соответствии со схемой на рис. 8.42,а ток ротора определяется как
Подставляя в (8.60) выражения для Е2 и x2 из (8.51) и (8.59), после простых преобразований получаем
Следует обратить внимание на принципиальную разницу выражений (8.60) и (8.61), несмотря на то, что они дают одну и ту же величину тока ротора I2. В выражении (8.60) ток определен через реальные значения параметров обмотки и ЭДС, которые, в соответствии с (8.51) и (8.58) являются функцией скольжения, т.е. скорости вращения ротора. В (8.61) же ток I2 определен через ЭДС и реактивное сопротивление при неподвижном роторе, а факт вращения ротора отражен в замене реального активного сопротивления роторной обмотки R2 расчетной величиной R2/s, т.е. величиной, обратно пропорциональной скольжению. Сказанное позволяет перейти к схеме замещения фазной обмотки ротора, неподвижной относительно статора (рис. 8.42,б), в которую вместо реальных величин Е2, R2 и x2 входят расчетные величины Е2k, R2/s и x2k.
Как видно, при замене вращающегося ротора на неподвижный активное сопротивление, входящее в его схему замещения его фазы увеличилось на

Таким образом, представив R2/s в виде суммы R2 и (1-s)/s R2 (рис. 8.39,в), можно считать, что активное сопротивление самой обмотки осталось прежним, следовательно, при том же токе не изменились и выделяемые в ней потери мощности P2'=I22 R2. Выделяемые же в добавленном сопротивлении потери

определяют преобразуемую механическую мощность, приходящуюся на одну фазу машины. Соответственно, для трехфазной машины полная механическая мощность определяется как

Для дальнейшего упрощения схемы замещения фазы АД и, соответственно, ее уравнений магнитную связь между обмотками целесообразно заменить электрической связью, т.е. схемы замещения статорной и роторных цепей объединить в одну электрическую схему. Тогда исследование работы АД сводится к расчетам одной относительно простой схемы, в которой токи и напряжения изменяются в едином масштабе. При этом, чтобы не нарушить режим работы объединенной схемы, необходимо предварительно уравнять значения Е1 и Е2k. Как следует из сопоставления (8.49) и (8.51), для этого необходимо значение Е2k умножить на w1kобм1 и разделить на w2kобм2. Заметим, что коэффициент
по аналогии с трансформаторами иногда называют коэффициентом трансформации.
При этом, чтобы изменение ЭДС обмотки ротора не привело к изменению развиваемой ею мощности, необходимо значение тока ротора I2 домножить на величину 1/k. Однако, чтобы эти изменения не привели к изменению потерь мощности в активном сопротивлении и реактивной мощности роторной цепи изменяются также значения активного и реактивного сопротивлений роторной цепи.
Из выражения для активной мощности, выделяемой в фазе роторной цепи
видно, что активное сопротивление ротора должно быть увеличено в k2 раз. Аналогично, реактивное сопротивление ротора также увеличивается в k2 раз.
В результате схема замещения фазы асинхронного двигателя может быть изображена как на рис. 8.43,а. В соответствии с указанными на схеме положительными направлениями токов и напряжений ей соответствует следующая система уравнений в векторной форме фазы АД с приведенными параметрами роторной обмотки
где

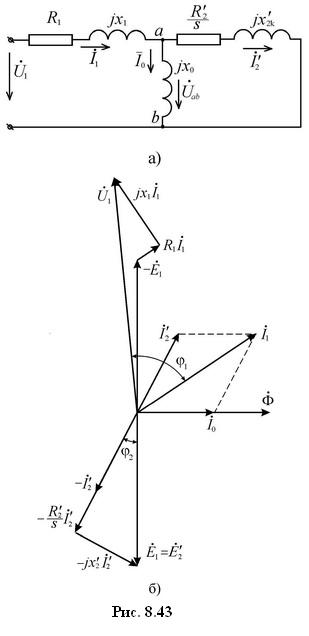
Векторная диаграмма, построенная по этим уравнениям, показана на рис. 8.43,б. В схеме и на векторной диаграмме фигурируют реальные величины фазного напряжения U1, тока статора I1 и сопротивлений статора R1 и X1, а также сопротивления обмотки ротора, приведенные к обмотке статора
и

приведенный к обмотке статора ток ротора

а также ток I0 и сопротивление x0 цепи намагничивания.
Двухконтурная схема, показанная на рис. 8.43,а в соответствии со своим видом получила название Т – образной схемы замещения фазы АД. Она достаточно точно отражает реальные физические процессы в двигателе, однако получаемые на ее основе соотношения часто излишне громоздки. В большинстве случаев более удобной является упрощенная схема замещения, в которой цепь намагничивания вынесена к зажимам источника питания, как показано на рис. 8.44. Обоснованием этого является то, что падения напряжения на сопротивлениях R1 и x1 от тока I1 обычно незначительны вследствие их малости. Получаемая в результате схема замещения, показанная на рис. 8.44, по аналогии с предыдущей (рис. 8.43,а), получила название Г – образной схемы замещения фазы АД.
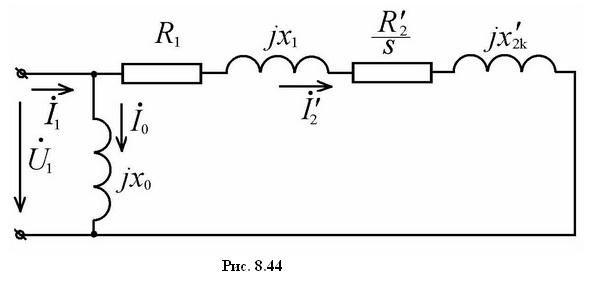
С помощью схем замещения, показанных на рис. 8.43,а и рис. 8.44, в частности, можно пояснить одну из характерных особенностей работы АД. В соответствии с первым закомом Кирхгофа, как следует из этих рисунков, ток статора I1 определяется суммой приведенного тока ротора и тока намагничивания I1 = I0 + I2. Без учета активного сопротивления обмотки статора R1 можно считать, что при постоянном напряжении на фазе U1, как следует из (8.49), поток Ф и, соответственно, вызвавший его ток намагничивания I0, также постоянны. Поскольку приведенный ток ротора I’2 зависит от нагрузки на валу, то изменение нагрузки и, соответственно, тока I’2 ведет к такому же изменению тока статора I1, т.е. тока, потребляемого из сети.
В реальных АД при изменении нагрузки на валу падение напряжения на сопротивлении R1, наводимая ЭДС Е1 и магнитный поток Ф не остаются постоянными. Однако для большинства режимов работы АД характерно значительное превышение Е1 над падением напряжения на R1 и U1 ~ Е1.
Соответственно, в этих режимах при изменении нагрузки на валу потребляемый от источника питания и протекающий в обмотках статора ток I1 и ток ротора I’2 изменяются практически в одинаковой степени. Доля же потребляемого из сети тока, идущего на создание магнитного поля, составляя примерно 40% от номинального значения тока статора, практически остается без изменения.
Электромеханическая и механическая характеристики
Выражение для электромеханической характеристики АД можно получить, определив приведенный ток ротора I2' на основе схемы замещения на рис. 8.44
Из (8.66) следует, что с увеличением скольжения ток ротора I2' монотонно растет, приближаясь к пределу при S→ . Предельное значение тока ротора равно
При отрицательных скольжениях ток ротора I2' изменяется от нуля до максимального значения
которое имеет место при

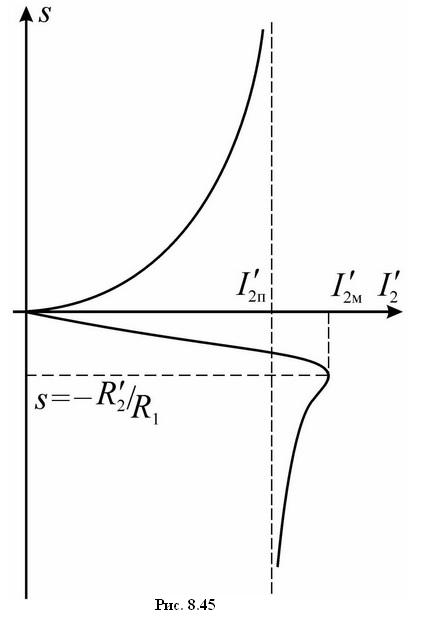
При дальнейшем увеличении s приведенный ток ротора стремится к предельному значению, определяемому соотношением (8.67). На рис. 8.45 показан вид зависимости I2' (s), построенной по (8.66).
Выражение для механической характеристики АД получим из следующих соображений. Потери скольжения Ps, определяемые по (8.41), в общем случае делятся на потери в электрических цепях двигателя и в стали (в магнитопроводе). Последние значительно меньше потерь в электрических цепях ротора, поэтому можно принять, что

Решая совместно уравнения (8.69) и (8.41), находим:
а с учетом (8.66) получаем
Это уравнение связывает электромагнитный момент и скольжение и представляет собой уравнение механической характеристики АД. Как видно, функция M(s) является нелинейной. Она имеет два максимума, в чем можно убедиться известным из математики способом, определив производную dM/ds и приравняв ее нулю. Получаемое таким образом уравнение относительно s является квадратным. Решение этого уравнения определяет критическое скольжение
Подставив в уравнение (8.71) значение s = sk, получаем величину критического или максимального момента

где знак «+» соответствует sk > 0, т.е. двигательному режиму, а знак «-« соответствует sk < 0, т.е. генераторному режиму. Так как все величины, входящие в полученное выражение (8.73), положительные, то очевидно значение критического момента для двигательного режима Мкд меньше, чем для генераторного режима Мкг, т.е. Мкд < Мкг.
механической характеристики АД можно придать более простую и удобную форму, если с учетом (8.71) и (8.73) найти отношение М к Мк и из полученного выражения найти М. В результате приходим к уравнению, широко известному как формула Клосса

где a = R1/(R2'). При построении зависимости М(s) по (8.74) величиной аsк обычно можно пренебречь, т.к. она, как правило, существенно меньше остальных членов выражения. В результате получаем формулу Клосса в упрощенном виде:
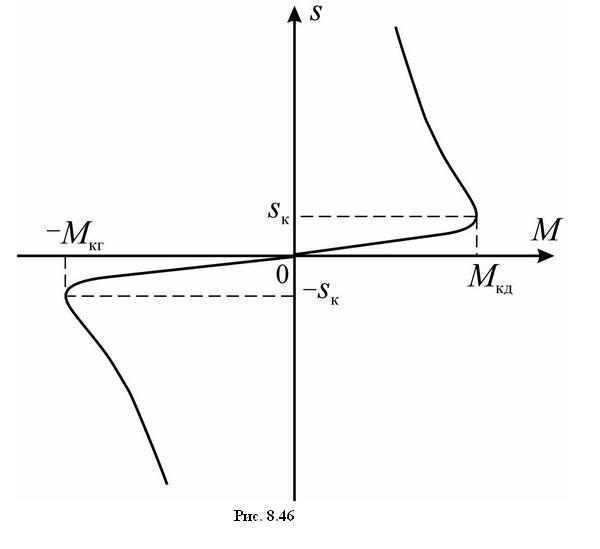
Выражение (8.75) широко используется на практике, т.к. значения sк и Мк обычно задаются в каталогах. Вид зависимости М(s) для двигательного и генераторного режима работы АД показан на рис. 8.46. Как видно, эта зависимость также нелинейна. На ней можно выделить две характерные зоны в зависимости от соотношения между s и sк. При малых s по сравнению с sк пренебрегая слагаемым s?sk в знаменателе (8.75), получаем уравнение прямой
Эта линейная часть механической характеристики АД и используется в основном при работе в установившихся режимах работы. На ней находится точка номинального режима работы. При больших s можно пренебречь слагаемым sk/s в знаменателе (8.75), что приводит к уравнению гиперболы
Это наиболее нелинейная часть механической характеристики. В установившемся режиме работы АД (при движении с постоянной скоростью) она практически не используется. Критическое скольжение с увеличением мощности асинхронных двигателей уменьшается. Для общепромышленных машин зависимость sк от номинальной мощности двигателя Рн примерно имеет вид, как показано на рис. 8.47.
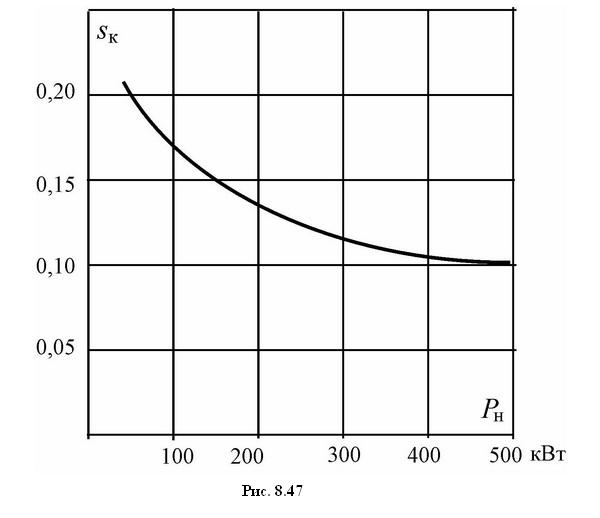
Для того, чтобы подчеркнуть наиболее важные особенности характеристик АД, изобразим зависимости М(?) и I2(?) в единой системе координат в виде, как показано на рис. 8.48. При рассмотрении рис. 8.45 можно заметить, что эти кривые близки по характеру изменения только при малых s, а при больших s их расхождение значительно. Наиболее простое физическое объяснение этому факту можно дать, если вновь обратиться к выражениям (8.69) и (8.70), предварительно представив в них потери мощности на активном сопротивлении фазы роторной обмотки I22R2 как произведение ЭДС ротора Е2 и активной составляющей тока ротора I2 cosφ2, т.е.

Подставляя в это выражение Е2 из (8.50) с учетом 8.43

Как видно, электромагнитный момент АД пропорционален магнитному потоку и активной составляющей тока ротора. В первом приближении, если пренебречь падением напряжения в статорной цепи, т.е.
то фазные напряжение и ЭДС равны, т.е. U1=E1 и, соответственно, при неизменном напряжении U1 и частоте f1 можно считать магнитный поток Ф постоянным, что следует из (8.49). Тогда соотношение между М и I2 определяется только зависимостью cosφ2 от скольжения s, которую можно представить в виде
Из выражения (8.80) следует, что при малых s значение cosφ2 близко к единице, поэтому между током и моментом практически прямопропорциональная зависимость, аналогично МПТ независимого возбуждения (см. выражение (8.14)). Однако с ростом s значение cosφ2 резко снижается, в результате чего при росте тока наблюдается снижение момента.
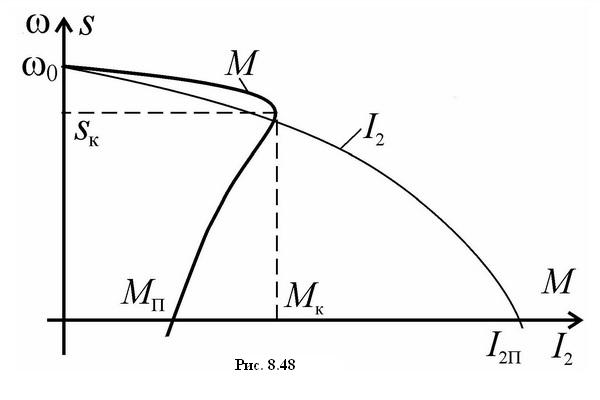
Для двигателей с к.з. ротором принципиальное значение имеет соотношение между током I2П и моментом МП при нулевой скорости, определяющее их пусковые свойства. Из рассмотрения рис. 8.48 видно, что в двигательном режиме работы АД имеет максимальный ток в начальный момент пуска. Для обычных двигателей кратность превышения пусковым током номинального значения обычно составляет от 5 до 7. Наоборот, пусковой момент относительно мал и составляет обычно от 1,2 до 1.4 от номинального значения момента. Это является принципиальной особенностью АД с к.з. ротором.
Для улучшения пусковых свойств у асинхронных двигателей с к.з. ротором используют специальные конструктивные приемы. Суть их сводится к обеспечению условий заметного проявления явления вытеснения тока в проводниках обмотки ротора вследствие поверхностного эффекта. Для этого обычно проводники ротора располагают в глубоких пазах (вытянутых в радиальном направлении), либо используют двойную беличью клетку.
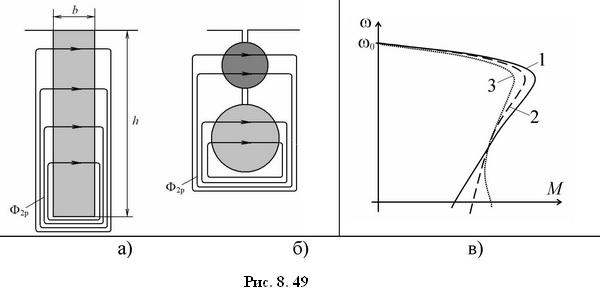
В первом случае (рис. 8.49,а) высота стержня h проводников ротора обычно выбирается в 3 – 4 раза превышающей его ширину b. Как видно из примерной картины распределения поля рассеяния, образованного током проводника, нижние части проводника охвачены большим числом силовых линий, чем верхние. Поэтому потокосцепление нижних слоев сплошного проводника оказывается большим, чем у верхних слоев и, соответственно, индуктивность рассеяния у верхних слоев ниже, чем у верхних. Поэтому индуктивное сопротивление проводника, также неравномерно распределено по его высоте.
С учетом того, что при пуске скольжение s = 1 и частота тока ротора максимальна, ин-дуктивное сопротивление нижних слоев значительно превышает активное сопротивление и ток вытесняется в верхние слои стержня. Это эквивалентно уменьшению площади проводника, что ведет к увеличению его эквивалентного активного сопротивления и, соответственно, к возрастанию пускового момента. По мере роста скорости скольжение и частота тока ротора снижаются, эффект вытеснения тока проявляется в меньшей степени, а в нормальной работе ток практически равномерно распределяется по всему сечению проводника. При этом эквивалентное сечение проводника возрастает, а его активное сопротивление уменьшается.
Еще более эффективное повышение пусковых свойств АД достигается при использовании на роторе двух короткозамкнутых обмоток – пусковой и рабочей. Проводники пусковой обмотки (рис. 8.49,б) имеют меньшее сечение с более высоким удельным сопротивлением материала и располагаются в верхней части паза, а рабочей обмотки – в нижней. При пуске, поскольку рабочая обмотка располагается глубоко в пазу, ее индуктивное сопротивление рассеяния значительно больше, чем у пусковой обмотки. В результате, ток протекает, в основном, по пусковой обмотке с большим активным сопротивлением. Это ведет, как и в первом случае, к ограничению пускового тока и к увеличению пускового момента.
На высокой скорости при низкой частоте тока ротора индуктивные сопротивления обеих обмоток малы и ток в основном протекает по обмотке с меньшим активным сопротивлением, т.е. по рабочей обмотке. Двойную беличью клетку используют преимущественно у мощных двигателей на сотни и тысячи киловатт.
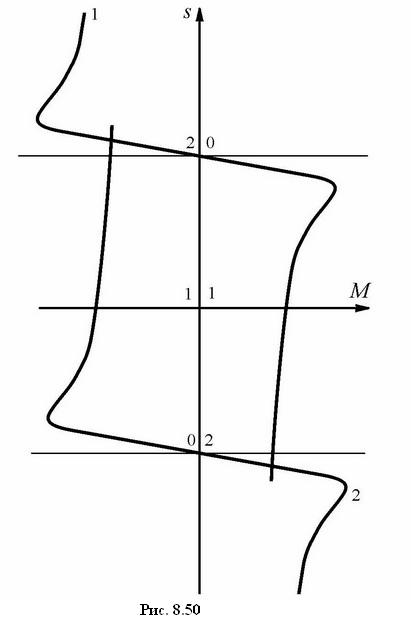
На рис. 8.49,в для сравнения показан примерный вид механических характеристик АД с обычным ротором (кривая 1), с глубоким пазом (кривая 2) и с двойной беличьей клеткой (кривая 3). Как видно, увеличение пускового момента происходит при некотором снижении критического момента. Это является следствием возрастания индуктивного сопротивления рассеяния обмотки ротора.
На рис. 8.50 показаны механические характеристики асинхронного двигателя M(s) для прямого (кривая 1) и обратного (кривая 2) направлений вращения. Реверс двигателя осуществляется изменением направления вращения поля статора посредством изменения чередования подключения фазных обмоток статора к источнику трехфазного напряжения. Участки обеих характеристик, расположенные в первом и третьем квадрантах, соответствуют двигательному режиму работы АД, а во втором и четвертом квадрантах – тормозным режимам.
8.4.4. Однофазные асинхронные двигатели.
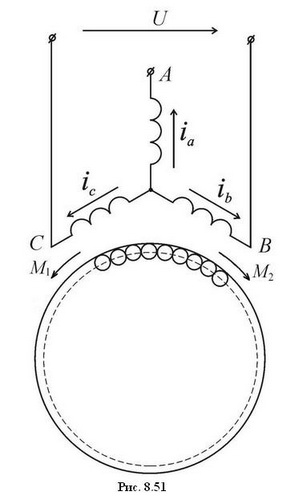
Двигатели этого типа мощностью, как правило, менее 5 кВт часто используются в бытовых установках (холодильниках, кондиционерах, вентиляторах и т.п.), на мелких предприятиях, размещающихся в жилых домах для привода механизмов при наличии только однофазной сети переменного тока. Они имеют худшие технико-экономические показатели по сравнению с трехфазными двигателями.
Наиболее просто такой двигатель можно получить из трехфазного, если одну из фазных обмоток отключить от источника питания, а две другие подключить к однофазному источнику (см. рис. 8.51). Реально такой режим возникает в аварийном режиме работы трехфазного двигателя при обрыве одной из фаз. Однако необходимо учитывать, что при одинаковых габаритах мощность однофазного двигателя составляет примерно 50 – 60% мощности трехфазного. Поэтому нарушение питания одной из фаз трехфазного двигателя, особенно с номинальной нагрузкой, влечет чрезмерное увеличение тока в обмотках и, как следствие, может явиться причиной выхода его из строя.
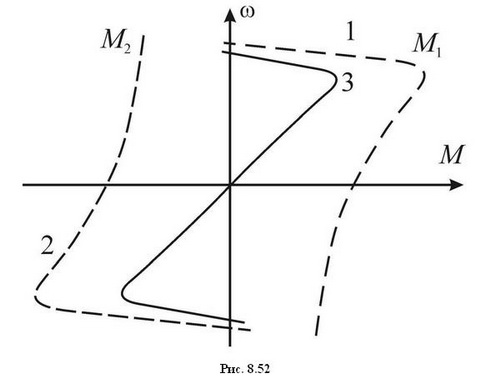
Однофазный ток статора создает пульсирующее магнитное поле, которое можно разложить на две составляющих, имеющих равные амплитуды и вращающиеся в разные стороны с одинаковой скоростью. При взаимодействии этих полей с током ротора создаются моменты М1 и М2, изменение которых в функции скорости вращения ротора ω можно представить механическими характеристиками 1 и 2 (рис. 8.52). Сложив моменты, соответствующие этим характеристикам при одинаковой скорости, можно получить результирующую механическую характеристику 3, которая, как видно, проходит через начало координат. Это является следствием того, что при неподвижном роторе (s=1) обе составляющих поля создают одинаковые по величине и разные по знаку моменты. Поэтому такие двигатели не создают пускового момента.
Если же ротор вращается в ту или иную сторону, один из моментов преобладает. При этом оба направления вращения равноценны с точки зрения создания движущего момента, а тормозной режим работы отсутствует. Для обеспечения пускового момента необходимо перейти от пульсирующего поля к вращающемуся эллиптическому, а в идеале к круговому полю за счет усиления прямого поля и ослабления обратного. Поскольку для создания вращающегося поля необходимо минимум две сдвинутых в пространстве обмотки, питаемых двухфазной системой токов (см. раздел 8.1), на период пуска однофазный двигатель превращают в двухфазный.
В трехфазных двигателях в однофазном режиме пусковой момент может быть создан за счет кратковременного подключения к источнику питания свободной фазы через конден-сатор. При использовании стандартного асинхронного двигателя мощностью до 10 кВт при питании от однофазной сети напряжением 220 В емкость пускового конденсатора обычно принимают равной 30 мкФ на каждый кВт номинальной мощности двигателя.
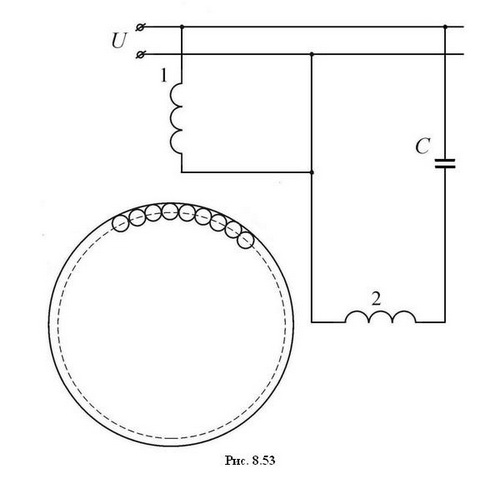
Наибольшее распространение получили однофазные двигатели с пусковой обмоткой и конденсаторные двигатели. И те и другие имеют на статоре две обмотки (обмотки 1 и 2 на рис. 8.53), а на роторе – обмотку в виде беличьей клетки. В первом случае одна из обмоток, располагаемых на статоре (обмотка 1), является рабочей. Она занимает 2/3 полюсного деления. Вторая обмотка, являющаяся пусковой (обмотка 2), располагается в свободных от рабочей обмотки пазах (на 1/3 полюсного деления). При этом угол между осями обмоток составляет 90°. Пусковая обмотка подключается к источнику питания только на время пуска через фазосмещающий элемент (например, конденсатор, как на рис. 8.53, или резистор). При использовании конденсатора обеспечивается сдвиг фаз напряжений на обмотках 1 и 2 около 90°, что соответствует наилучшим условиям пуска. При достижении определенной скорости пусковая обмотка отключается.
У асинхронного конденсаторного двигателя на статоре располагают две рабочих обмотки, сдвинутые в пространстве на 900. Одна из обмоток включается к источнику питания напрямую, а вторая - через конденсатор. Из условия получения кругового поля числа витков этих обмоток в общем случае могут быть разными. По сути, такой двигатель, является двухфазным. При фиксированной емкости конденсатора круговое поле может быть получено только при вполне определенной нагрузке (при одном значении тока). При других токах поле искажается и условия пуска ухудшаются. Поэтому обычно на время пуска параллельно рабочему конденсатору включают дополнительный пусковой конденсатор. Поскольку конденсаторные двигатели работают практически с круговым магнитным полем, их технико-экономические показатели выше, чем у двигателей с пусковой обмоткой и близки к показателям трехфазных двигателей.
8.4.5. Единые серии асинхронных машин.
Электрические машины общепромышленного применения проектируются и выпускаются отечественными предприятиями в виде единых серий, охватывающих определенный диапазон мощностей, частот вращения и напряжений питания. В целях удешевления производства и обеспечения взаимозаменяемости деталей и узлов пределах каждой серии стремятся к однотипности конструктивных решений и применяемых материалов, а также стандартизуется шкала мощностей, установочных размеров и т.п. Основным размером, определяющим габарит машины, принято считать высоту оси – расстояние от оси вращения до опорной плоскости машины.
По мере совершенствования технологии, появления новых материалов, развития теории устаревшие серии снимаются с производства, а им на смену приходят более совершенные. Так, середины 70-х годов прошлого века основной серией асинхронных машин была серия 4А, охватывающая высоты оси вращения от 50 до 335 мм и номинальные мощности от 0,06 до 400 кВт. В 80-е годы разработана серия АИ, отличающаяся от серии 4А, главным образом, большей надежностью, лучшими массогабаритными и энергетическими показателями.
С 90-х годов выпускаются машины серий 5А и серии РА с повышенным пусковым моментом и пониженным пусковым током за счет оптимизации формы пазов, более высокими надежностью, КПД и теплостойкостью изоляции. В серии РА осуществлены дальнейшая оптимизация конструкции, понижение потерь в стали, шума и вибраций. В каждой серии кроме основного исполнения машин предусматривается ряд дополнительных модификаций: с повышенным скольжением, многоскоростные, с фазным ротором и т.д.
8.5. Принцип действия и характеристики синхронных машин.
8.5.1. Простейшая модель синхронной машины.
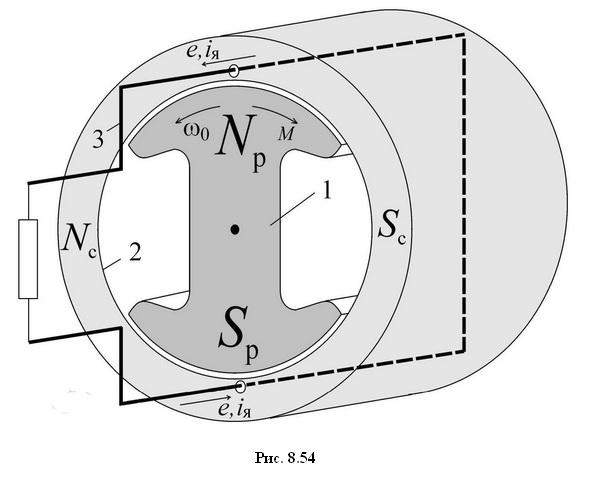
Обратимся к рис. 8.33. Поскольку в устройстве, изображенном на нем, частота наводимой ЭДС, тока и, соответственно, скорость вращения поля якоря относительно якоря жестко связаны со скоростью его вращения, такая конструкция представляет собой простейшую модель синхронного генератора переменного тока с вращающимся якорем. Синхронные машины, в которых якорная обмотка расположена на роторе, как на рис. 8.33, получили название обращенных и используются относительно редко. В них для обеспечения электрического контакта подвижной якорной обмотки с внешней цепью необходимо использовать скользящий контакт. В генераторном режиме работы таких машин через скользящий контакт должен подключаться потребитель электрической энергии, а в двигательном – многофазный источник питания. Однако по условиям практического удобства якорную обмотку чаще располагают на статоре, а полюса возбуждения на роторе. Простейшая модель такой машины может быть представлена, как на рис. 8.54. Она состоит из двухполюсного ротора 1 и расположенного на статоре 2 неподвижного витка 3.
Генераторный режим. При вращении полюсов ротора 1 на рис. 8.54 с угловой скоростью омега0 внешним источником механической мощности в направлении против часовой стрелки создается вращающееся относительно статора 2 магнитное поле и в замкнутом на внешний резистор витке наводится ЭДС е и течет ток iя, изменяющиеся с частотой
Так как на большей части внутренней поверхности статора воздушный зазор между ним и полюсами ротора постоянен, форма ЭДС е и тока в витке iя в рассматриваемой модели будут аналогичны показанным на рис. 8.8. Если на статоре разместить второй виток, смещенный относительно первого в пространстве, например, на 90°, то в нем также будет наводиться ЭДС той же формы и частоты, но смещенная во времени относительно ЭДС первого витка на половину периода. Соответственно, если на статоре разместить три витка со взаимным пространственным сдвигом в 120°, можно получить систему трехфазных ЭДС. При взаимодействии потока возбуждения с токами статорной обмотки создается момент М, направленный встречно движению и уравновешивающий момент внешних сил.
Двигательный режим. В двигательном режиме неподвижная статорная обмотка должна создавать вращающееся магнитное поле. Для этого, как мы уже знаем, она должна быть многофазной, распределенной в пространстве и питаться многофазной системой токов. При этом для взаимодействия полей статора и ротора количество пар полюсов на них должно быть одинаково. Тогда к вращающимся со скоростью ?0 полюсам статора Nс и Sс притянутся соответствующие полюса ротора противоположной полярности Nр и Sр и будут вращаться вместе с ними с той же скоростью ?0 (например, как на рис. 8.55,а).
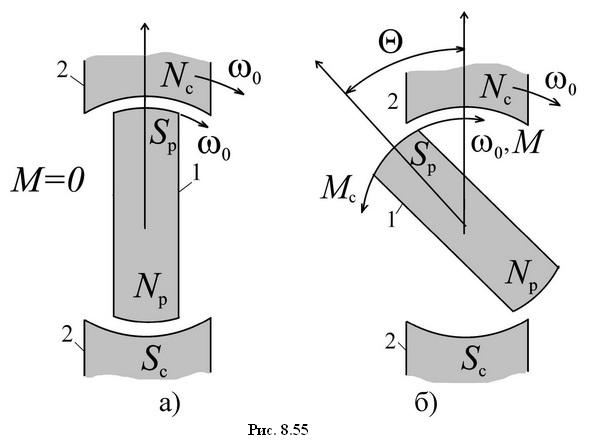
При отсутствии момента внешней нагрузки Мс оси полюсов ротора 1 и статора 2 совпадают и в идеале двигатель не развивает электромагнитного момента (реально развивает момент, покрывающий потери). Если же к валу двигателя приложен внешний момент Мс, под действием этого момента ротор отклоняется в сторону отставания по отношению к направлению движения на некоторый угол Θ. На полюса ротора действует электромагнитный момент М, направленный в сторону движения и стремящийся выравнить оси полюсов (рис. 8.55,б). Этот момент уравновешивает момент внешних сил Мс. Однако полюса ротора отставая от полюсов статора на угол Θ, при этом вращаются по-прежнему со скоростью ?0. Таким образом, в синхронной машине полюса ротора связаны с полюсами статора так называемой «магнитной пружиной», которая «сжимается» или «растягивается» в зависимости от нагрузки на валу. При этом средняя скорость вращения ротора всегда равна скорости вращения поля статора.
8.5.2. Особенности конструкции и характеристики реальных синхронных машин.
Синхронные электрические машины находят применение не только в качестве двигателей в электроприводе, но и широко используются также в качестве генераторов электрической энергии и компенсаторов реактивной энергии. Их мощность может достигать нескольких сотен тысяч киловатт. Синхронные двигатели (СД) традиционно находят применение в нерегулируемых электроприводах большой мощности (свыше 150 кВт). В настоящее время с развитием силовой преобразовательной техники все активнее применяются синхронные двигатели и в регулируемых электроприводах мощностью от нескольких ватт до сотен киловатт.
Конструкция статора синхронной машины принципиально не отличается от конструкции статора асинхронной машины. На шихтованном статоре в пазах располагается в общем случае многофазная (чаще трехфазная) обмотка, питаемая многофазной системой токов, в результате чего образуется вращающееся магнитное поле. По функциональному назначению обмотка статора является якорной обмоткой, т.е. в ней наводится ЭДС движения и посредством нее обеспечивается обмен энергией между сетью и машиной.
Конструкции роторов синхронных машин бывают явнополюсными и неявнополюсными. Ротор явнополюсных машин имеет выступающие полюса, аналогично тому, как это изображено в простейшей модели на рис. 8.54. Однако реальные конструкции явнополюсных роторов обычно имеют несколько пар полюсов (при питании от промышленной сети частотой 50 Гц число пар полюсов может достигать нескольких десятков) и, соответственно, вдвое большее число полюсных выступов.
Конструктивное исполнение ротора зависит также от способа создания потока возбуждения. Полюса на явнополюсном роторе могут быть созданы как постоянными магнитами, так и обмоткой возбуждения, поэтому различают, соответственно, машины с магнитоэлектрическим и электромагнитным возбуждением. Первые иногда называют бесконтактными синхронными машинами, т.к. в них отсутствуют скользящие контакты. Они не потребляют энергии на возбуждение и имеют повышенный КПД, более надежны в работе.
С освоением промышленностью высококоэрцитивных магнитотвердых материалов с большой магнитной энергией интерес к таким машинам неуклонно растет. Именно на их основе эффективно реализуются бесконтактные двигатели постоянного тока. Их недостатки связаны с относительно высокой стоимостью и с возрастающей сложностью крепления постоянных магнитов на роторе по мере роста скорости и выходной мощности, а также с невозможностью изменения потока возбуждения в процессе эксплуатации. В настоящее время их изготавливают на мощности от единиц ватт до нескольких киловатт.
Обычно явнополюсные роторы применяют также в крупных машинах с электромагнитным возбуждением при относительно низкой частоте вращения (от 1000 об/мин и менее). Полюса в принципе могут выполняться сплошными, поскольку в установившемся режиме работы магнитный поток неподвижен относительно ротора и не вызывает в нем потерь энергии. Однако, как правило, для снижения магнитных потерь в переходных режимах, а также по технологическим соображениям магнитопроводы роторов набираются из листов электротехнической стали толщиной 0,5 – 1 мм и стягиваются с помощью шпилек.
Обмотка возбуждения крупных машин для лучшего охлаждения наматывается из неизолированной полосовой меди, изолируемой между слоями специальными изоляционными прокладками. В полюсных наконечниках ротора размещается короткозамкнутая пусковая обмотка из проводникового материала с повышенным сопротивлением (например, из латуни). С помощью этой обмотки обеспечивается асинхронный пуск синхронного двигателя.
При высоких частотах вращения (3000, 1500 об/мин.) в крупных синхронных машинах обычно используют неявнополюсную конструкцию ротора, из-за возрастающей сложности обеспечения прочности крепления полюсных выступов и обмотки возбуждения на них с ростом скорости. Такие двигатели имеют цилиндрический ротор из массивной стальной поковки с пазами в которые укладывается распределенная обмотка возбуждения.
Для получения кривой ЭДС, близкой по форме к синусоиде необходимо, чтобы кривая поля в воздушном зазоре была распределена по синусоидальному закону. В явнополюсных машинах для этого зазор между полюсами ротора и статором выполняют неодинаковым. Обычно под краями зазор принимают в 1.5 – 2 раза большим, чем под серединой. В неявнополюсных машинах улучшение формы поля достигается соответствующим неравномерным распределением пазов на роторе.
Кроме того, на роторе синхронных машин с электромагнитным возбуждением располагаются контактные кольца. С помощью колец и прилегающих к ним щеток роторная обмотка подключается к источнику постоянного напряжения.
Схема замещения фазы синхронного двигателя
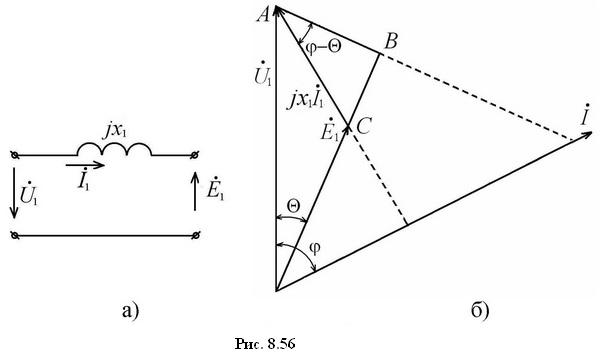
Наиболее простой вид имеет схема замещения фазной обмотки статора неявнополюсной синхронной машины. Если пренебречь активным сопротивлением фазы, прикладываемое к фазе напряжение U1 уравновешивается лишь наводимой в ней ЭДС Е1. Поэтому схема замещения фазы может быть представлена только реактивным сопротивлением x1, обусловленным потоком рассеяния, как на рис. 8.56,а. Векторная диаграмма, соответствующая этой схеме, представлена на рис. 8.56,б.
Соотношение между входными электрическими и выходными механическими величинами можно получить приравняв потребляемую из сети активную мощность Р1=3U1I1cosφ и электромагнитную мощность Рэл= Мω0, т.е.

откуда получаем

Из векторной диаграммы на рис. 8.56,б следует соотношение:

а из вспомогательного треугольника АВС находим

С учетом (8.84) и (8.85) выражение (8.83) приобретает вид

Зависимость М(Θ), построенная по (8.86), показана на рис. 8.57 (кривая 1). Как видно, электромагнитный момент синхронной машины зависит от угла рассогласования между напряжением и наводимой ЭДС или, что тоже самое, от угла между осями полюсов статора и ротора Θ. Поэтому зависимость М( Θ) получила название угловой или моментной характеристики, а угол Θ, соответственно, называют углом нагрузки.
Максимального значения Мmax момент достигает, когда полюс ротора находится между полюсами статора, а угол нагрузки равен Θ = π/2. Это предельное значение момента нагрузки, при котором сохраняется синхронное вращение ротора. При превышении моментом нагрузки значения Мmax работоспособность двигателя нарушается, при этом обычно говорят, что двигатель выпадает из синхронизма. Таким образом, механическая характеристика синхронного двигателя представляет собой прямую, параллельную оси момента в пределах от - Мmax до Мmax (рис. 8.58).
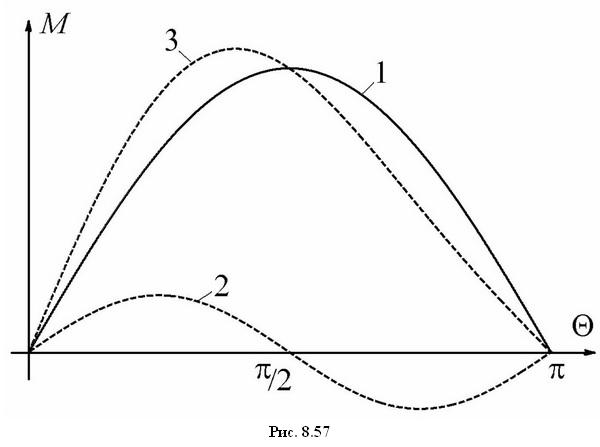 |
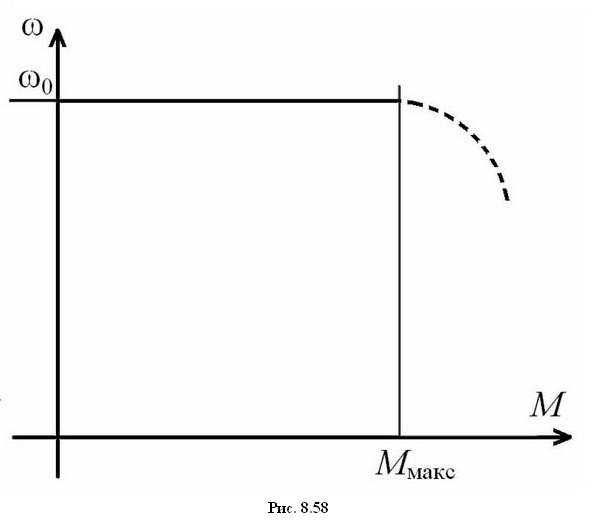 |
В явнополюсных машинах воздушный зазор между полюсами статора и ротора зависит от положения ротора, поэтому электромагнитный момент имеет две составляющих – активную и реактивную. Активная составляющая момента, определяемая по (8.86), обусловлена взаимодействием полей статора и ротора как и при неявнополюсном роторе. Реактивная составляющая (кривая 2 на рис. 8.57), обусловлена стремлением ротора занять положение, при котором магнитная проницаемость для пути замыкания потока максимальна (соосное положение полюсов статора и ротора). Она изменяется с удвоенной частотой относительно активной составляющей момента. При номинальном возбуждении амплитуда реактивной составляющей момента обычно составляет 20-30% от амплитуды первой составляющей момента. Поэтому результирующая угловая характеристика явнополюсной машины имеет вид кривой 3 на рис. 8.58.
Важным достоинством синхронных двигателей с электромагнитным возбуждением является возможность регулирования потребляемого из сети реактивного тока за счет соответствующего изменения тока возбуждения. Это можно пояснить с помощью векторных диаграмм для трех характерных значений тока возбуждения, показанных на рис. 8.59 а, б, в. но при одинаковой выходной мощности двигателя (при одном и том же значении момента или активной составляющей тока статора).
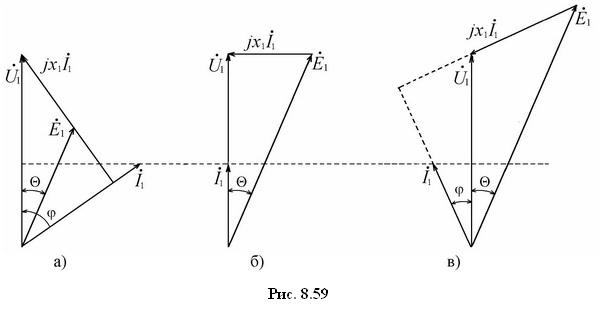
В недовозбужденной машине (рис. 8.59,а) вектор тока I1 отстает от вектора напряжения U1 на некоторый угол φ. В этом случае иногда говорят, что машина работает с отстающим коэффициентом мощности cosφ (реактивная мощность потребляется из сети). С увеличением тока возбуждения растет наводимая в обмотках статора ЭДС Е1 и при некотором ее значении вектор тока I1 может совпасть по направлению с вектором напряжения U1 (рис. 8.59,б). В этом случае машина потребляет из сети только активную составляющую тока I1 и cosφ = 1. Это наиболее благоприятный режим работы синхронной машины, т.к. при минимальном потребляемом токе потери, выделяемые в ней, также будут минимальными.
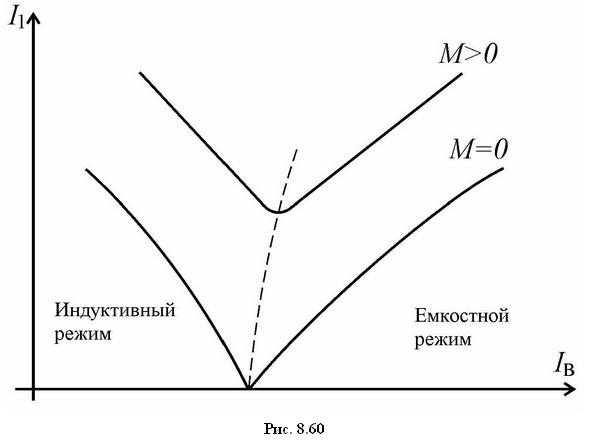
В перевозбужденной машине, как показано на рис. 8.59,в (при дальнейшем увеличении тока возбуждения) и, соответственно, при дальнейшем возрастании ЭДС Е1, ток статора I1 начинает уже опережать по фазе напряжение U1. В результате cosφ становится опережающим и синхронный двигатель, потребляя из сети активный ток, является источником реактивного тока. Зависимость тока статора I1 от тока возбуждения Iв в функции развиваемого момента М имеет примерно вид, как показано на рис. 8.60. Минимуму тока на этих зависимостях, которые в соответствии со своим видом получили название U-образных характеристик синхронного двигателя, соответствует работа при cosφ = 1.
8.5.3. Синхронные шаговые двигатели.
При необходимости получения строго дозированных перемещений элементов рабочих машин с фиксацией конечного положения, например, нажимных винтов прокатных ста-нов, механизмов подачи металлорежущих станков, звеньев манипуляторов или прецизионных сборочных агрегатов и т.д., находят применение синхронные шаговые двигатели (ШД). В отличие от обычных синхронных двигателей непрерывного типа в ШД вращение ротора происходит в результате последовательности его дискретных смещений – шагов под воздействием импульсных управляющих команд, формируемых специальным устройством – электронным коммутатором. Поэтому ШД может работать только в совокупности с электронными средствами управления.
Широкое распространение ШД обусловлено тем, что по своей природе они наиболее органично сочетаются с современными цифровыми системами управления: управляющими ЭВМ и т.п. Как правило, электроприводы с ШД в таких системах более надежны, компактны и точны. При применении специальных способов управления точность отработки заданного положения подвижных частей механизма может достигать единиц и даже долей микрона. Мощность выпускаемых в настоящее время ШД колеблется от единиц ватт до нескольких киловатт.
Как и синхронные электрические машины непрерывного вращения, ШД различаются по способу возбуждения, числу фаз, числу полюсов, специальным особенностям конструк-тивного исполнения и т.п. Статор ШД имеет несколько смещенных в пространстве сосредо-точенных или распределенных обмоток. Ротор всегда имеет явнополюсное исполнение и выполняется либо активным (имеющим обмотку возбуждения или постоянные магниты), либо пассивным (реактивным) из ферромагнитного материала с высокой магнитной прони-цаемостью.
Одной из важнейших характеристик ШД, определяющих их точность, является угловой шаг αш перемещения ротора при каждом переключении (коммутации) его обмоток. Он зависит от конструктивного исполнения ШД и используемого алгоритма коммутации обмоток. У ШД с активным ротором в силу конструктивных ограничений при обычных способах коммутации он обычно составляет от π/12 до π/2. Реактивные ШД позволяют получить меньший шаг – до одного градуса.
Среди ШД с активным ротором наибольшее распространение получили двигатели с возбуждением от постоянных магнитов (магнитоэлектрические ШД). Основное их достоинство – возможность фиксации или запоминания конечного положения ротора при полностью обесточенных обмотках. Одна из возможных конструкций ШД с активным ротором показана на рис. 8.61. Статор имеет 8 полюсных выступов с расположенными на них сосредоточенными обмотками a, b, c, d, e, f, g, h. Четырехполюсный ротор с вмонтированными постоянными магнитами выполнен в виде звездочки.
Двигатель работает следующим образом. Пусть в исходном состоянии электронным коммутатором подключены к источнику постоянного напряжения фазные обмотки a, c, e, g, в результате чего на статоре образуется система чередующихся северных и южных полюсов. При этом в случае отсутствия нагрузки на валу ротор занимает положение, при котором его полюса ориентированы согласно с возбужденными полюсами статора, как показано на рис. 8.61,а. Это положение ротора устойчиво, поскольку при его отклонении в любую сторону в результате взаимодействия противоположных полюсов статора и ротора возникает синхронизирующий момент, стремящийся вернуть ротор в прежнее положение.
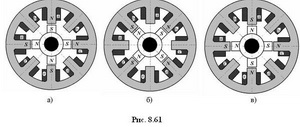
Однако, как только электронным коммутатором фазные обмотки a,c,e,g будут отключены от источника питания и подключатся обмотки b, d, f, h в полярности, при которой система полюсов статора сместится по часовой стрелке на 450, положение устойчивого равновесия ротора также сместится на этот же угол. К ротору ШД будет приложен синхронизирующий момент, стремящийся повернуть его в новое устойчивое положение. Под воздействием этого момента ротор сместится на один шаг и займет положение, как показано на рис. 8.61,б. Соответственно, при дальнейшем смещении положения устойчивого равновесия ротора в результате отключения обмоток b, d, f, h и включения обмоток a, c, e, g в необходимой полярности вновь произойдет смещение положения устойчивого положения ротора и он сместится еще на один шаг (рис. 8.61,в) и т.д. Временные диаграммы изменения напряжения на обмотках Ua,c,e,g и Ub,d,f,h показаны на рис. 8.62.
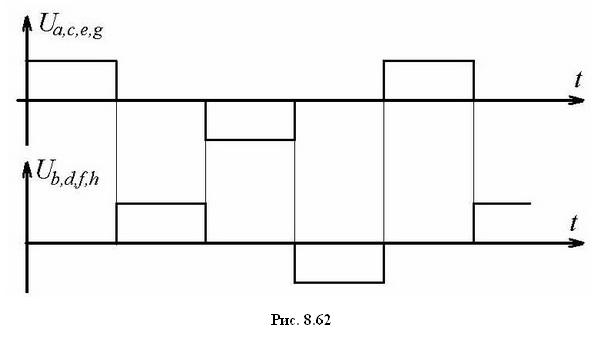
Обратим внимание на то, что поскольку для совершения каждого шага ШД изменяется электрическое состояние половины его обмоток, то он является двухфазным двигателем (m = 2) с числом пар полюсов на фазу p = 8. При этом как видно, при рассматриваемом простейшем способе коммутации, называемом одиночной коммутацией, первая фаза (обмотки a, c, e, g) и вторая фаза (обмотки b, d, f, h) ШД подключаются к источнику питания поочередно и механический шаг перемещения ротора составляет 45°. Для совершения ротором полного оборота необходимо произвести 8 переключений – тактов коммутации. В общем случае при произвольном числе фаз m механический шаг ШД при одиночной коммутации определяется из выражения:
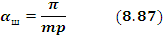
При использовании более сложного смешанного алгоритма переключения обмоток можно добиться уменьшения шага перемещения ротора. В частности, в показанном на рис. 8.61 двигателе можно чередовать одиночное и парное включение фаз, что позволяет увеличить число устойчивых состояний ротора в пределах одного оборота и, соответственно, уменьшить шаг ротора в два раза.
Если при исходном положении ротора, показанном на рис. 8.61,а при первой коммутации включить вторую фазу без отключения первой, то устойчивое положение ротора смещается относительно начального положения не на 45°, а на 22,5°. Затем при второй коммутации первая фаза отключается, а вторая остается включенной и положение устойчивого положения ротора вновь смещается на 22,5°. В дальнейшем при сохранении состояния второй фазы включается первая фаза в противоположной полярности и т.д. Временная диаграмма изменения напряжений на фазах ШД для этого способа коммутации показана на рис. 8.63.
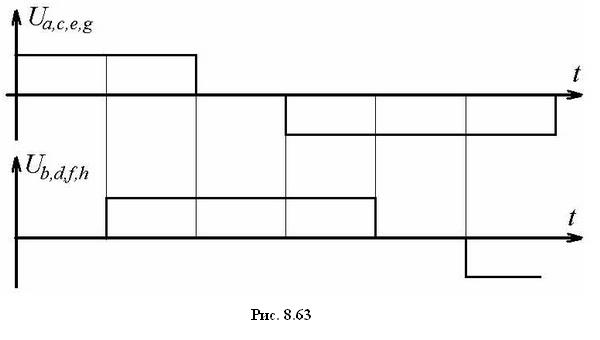
Реактивные ШД обычно имеют явновыраженные зубчатые полюса на статоре и зубчатый ротор, причем обмотки возбуждения располагаются только на статоре. При совпадении осей зубцов каких либо полюсов статора и ротора, оси зубцов ближайшего полюса статора и ротора сдвинуты на некоторый угол (рис. 8.64). Вращение ротора происходит при поочередном возбуждении полюсов статора. Зубчатый ротор всякий раз стремится занять положение, при котором оси зубцов возбужденного полюса статора и ротора совпадают, что соответствует минимальному магнитному сопротивлению воздушного промежутка между ними. В качестве примера на рис. 8.64,а показано взаимное положение взаимодействующих зубцов статора и ротора при подключении к источнику обмотки a, а рис. 8.64,б, обмотки b, соответственно. При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора, что обеспечивает электромагнитную редукцию угла поворота ротора. Поэтому такие ШД иногда называют редукторными.
Дополнительное уменьшение шага перемещения ШД достигают за счет так называемого электронного дробления шага. Суть его состоит в том, что напряжения на коммутируемых фазах (отключаемой и включаемой) изменяют не сразу, а поэтапно. Например, для двух смежных фаз ШД а и в, условно показанных на рис. 8.65,а можно создать по два промежуточных уровня напряжений Uа1, Uа2 и Uв1, Uв2, соответственно.
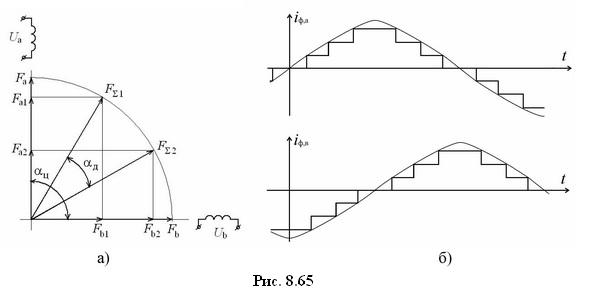
Это приведет к соответствующему изменению МДС фаз Fа1, Fа2 и Fв1, Fв2 и к появлению двух промежуточных положений вектора результирующей МДС Fα1 и Fα2 (см. векторную диаграмму на 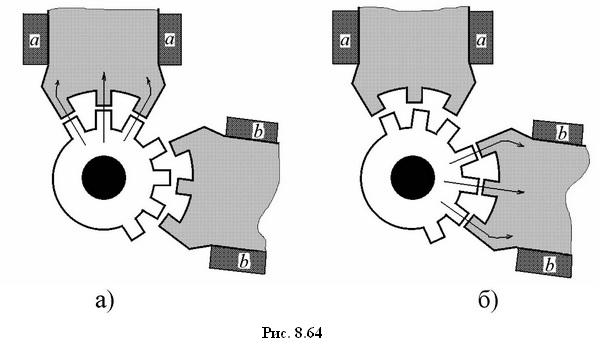 рис. 8.65,а). Поскольку угол поворота вектора результирующей МДС Fα с каждым переключением фаз ШД становится меньше, чем при обычном управлении, это влечет соответствующее уменьшение шага перемещения ротора ШД. Увеличивая число промежуточных уровней напряжений на фазах можно добиться значительного уменьшения дробного шага ?д по отношению к целому шагу αш при обычном управлении. Реально, для обеспечения равномерности и плавности перемещения ротора ШД форму его фазных токов приближают к синусоидальной. Примерный вид фазных токов iф,а и iф,в двухфазного ШД при дроблении его целого шага ?ш на три дробных шага αд показан на рис. 8.65,б.
рис. 8.65,а). Поскольку угол поворота вектора результирующей МДС Fα с каждым переключением фаз ШД становится меньше, чем при обычном управлении, это влечет соответствующее уменьшение шага перемещения ротора ШД. Увеличивая число промежуточных уровней напряжений на фазах можно добиться значительного уменьшения дробного шага ?д по отношению к целому шагу αш при обычном управлении. Реально, для обеспечения равномерности и плавности перемещения ротора ШД форму его фазных токов приближают к синусоидальной. Примерный вид фазных токов iф,а и iф,в двухфазного ШД при дроблении его целого шага ?ш на три дробных шага αд показан на рис. 8.65,б.
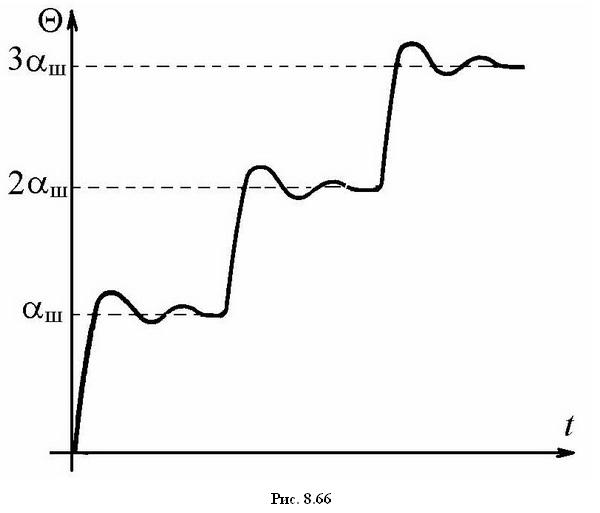
Типовыми режимами работы ШД являются режим непрерывного вращения и режим единичных шагов. В режиме непрерывного вращения у рассматриваемых ШД, как и у обычных синхронных машин, средняя скорость вращения ротора не зависит от нагрузки. Она определяется частотой коммутации фазных обмоток. Соответственно, угол поворота ротора определяется количеством переключений фаз. Поэтому одной из важнейших характеристик ШД является частота приемистости – максимальная частота коммутации фаз, при которой возможен пуск двигателя из состояния покоя без потери шагов. Она ограничивается электромагнитной и механической инерционностью ШД.
В режиме единичных шагов угол поворота ротора также складывается из последовательности шагов ротора, но команда на следующий шаг подается только после полной отработки предыдущего шага при нулевой скорости ротора. В результате, характер изменения во времени результирующего угла поворота ротора Θ примерно имеет вид, как показано, на рис. 8.66. Такой режим работы ШД получил название стартстопного. Один их характерных примеров использования этого режима – привод вращения стрелок кварцевых часов.
8.6. Потери мощности и энергетические характеристики электрических машин.
Процесс преобразования энергии в любой электрической машине всегда сопровождается потерями, выделяющимися в виде тепла. Потери обычно разделяют на основные и добавочные. К основным относят электрические, магнитные и механические потери.
К электрическим потерям ΔРэ относят потери в обмотках ΔРэо и в переходных сопротивлениях щеточных контактов ΔРэщ. Мощность потерь, идущая на нагрев обмоток ΔPэо, определяется законом Джоуля, в соответствии с которым в общем случае для m – фазной машины при токе в фазе I и ее расчетном сопротивлении R (при температуре 75° С) эта составляющая потерь определяется как

При расчете потерь в машинах постоянного тока принимается m=1 и потери в якорной обмотке и в обмотке возбуждения определяются отдельно. С целью уменьшения этой составляющей потерь стремятся проводники обмоток делать по возможности большего сечения из материала с малым удельным сопротивлением (например, медная проволока с малым содержанием примесей).
потерь в переходном сопротивлении каждого щеточного контакта ΔРэщ принимается пропорциональной падению напряжения на контакте ΔUщ

В зависимости от используемых материалов значение ΔUщ колеблется от 0,3 до 1 В. В бесконтактных электрических машинах (например, в асинхронных с к.з. ротором) эта составляющая потерь отсутствует.
Магнитные потери ΔРм, называемые также потерями в стали, наиболее сложно поддаются количественной оценке. Они включают в себя потери на гистерезис и вихревые токи и зависят от марки стали, индукции, частоты перемагничивания. Для уменьшения потерь от вихревых токов стальные участки магнитопроводов делают шихтованными. В машинах постоянного тока в установившихся режимах работы магнитный поток может быть принят неизмененным, поэтому в них магнитные потери выделяются только в якоре, а в ярме и полюсах они отсутствуют. В машинах переменного тока магнитные потери возникают большей частью в статоре.
Для определения магнитных потерь используют приближенную формулу

где kобр – коэффициент, зависящий от способа обработки стали, для асинхронных машин колеблется от 1,4 до 1,8, для машин постоянного тока принимается около 2,3; pуд – удельные потери в стали при частоте перемагничивания 50 Гц и индукции 1 Тл; β - показатель степени, зависящий от марки стали; Bi – индукция в соответствующей части магнитопровода, Gi – масса магнитопровода.
Механические потери ΔРмех состоят из потерь на трение щеток о коллектор или контактные кольца, потерь на трение в подшипниках и вентиляционных потерь. Каждая из этих составляющих потерь зависит от конкретного исполнения машины и определяется отдельно. В частности вентиляционные потери определяются конструкцией машины и принятой системой вентиляции (с самовентиляцией, с независимой вентиляцией и т.п.). Наиболее сложно поддаются расчету потери в подшипниках и вентиляционные потери. Чаще их определяют по результатам заводских испытаний машин, близких по размерам и частотам вращения.
Можно считать, что функционально механические потери не зависят от нагрузки и пропорциональны квадрату скорости вращения. Так, в машинах постоянного тока мощностью от 10 до 500 Вт механические потери составляют от 2 до 0,5% номинальной мощности.
Добавочные потери ΔРдоб обусловлены вторичными явлениями в электрической машине (неравномерным магнитным полем в воздушном зазоре, вихревыми токами в крепежных деталях и т.п.). Добавочные потери обычно учитывают только в крупных электрических машинах. Обычно принимают, что добавочные потери в общепромышленных сериях машин составляют около 1% номинальной мощности.
Все потери, выделяемые в электрической машине ΔРΣ, условно делят на постоянные K и переменные V, т.е. ΔРΣ = K + V. Постоянные потери не зависят или слабо зависят от нагрузки. К ним обычно относят механические потери и потери в стали. Электрические потери, зависящие от нагрузки (от тока в силовой цепи двигателя), относят к переменным потерям. Если ΔРэщ малы или отсутствуют, то можно считать, что переменные потери пропорциональны квадрату тока, т.е. V = СI2.
Для исключения чрезмерного нагрева машин из-за выделяющихся в них потерь ис-пользуются специальные системы охлаждения с применением тех или иных теплоносителей (чаще всего воздуха), причем с ростом мощности машины условия охлаждения ухудшаются. Перегрев машины приводит к ускоренному старению ее изоляции и сокращению срока службы. Способы охлаждения зависят от конструктивного исполнения машин. Наиболее типичными исполнениями являются: открытые машины, не имеющие специальных приспособлений для предотвращения попадания посторонних предметов внутрь машины (используются в машинных залах, лабораториях); защищенные – с такими приспособлениями (могут использоваться и на открытом воздухе); закрытые машины с полностью отделенным внутренним пространством от внешней среды (используются в пыльных, взрывоопасных, с повышенной влажностью и т.п. помещениях).
Вентиляция машин может быть естественной, когда движение охлаждающего воздуха создается в результате вращения самой машины (в открытых машинах) и искусственной посредством вентилятора. Причем, вентилятор может быть установлен на валу самой машины (самовентиляция), а может приводиться в движение специальным устройством (независимая вентиляция).
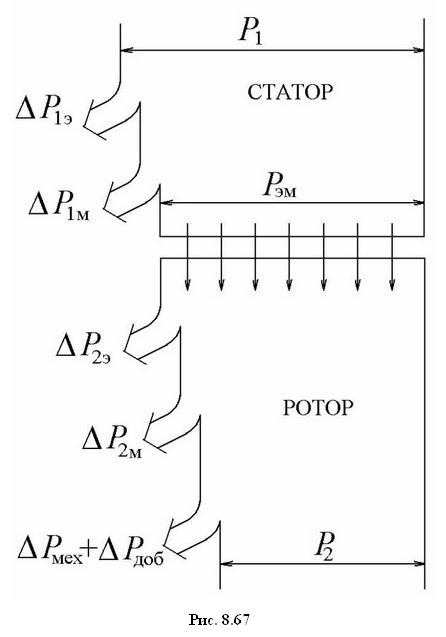
Обычно для наиболее наглядного представления энергетических соотношений в электрических машинах используют так называемые энергетические диаграммы. В качестве примера на рис. 8.67 показана энергетическая диаграмма асинхронного двигателя. В соответствии с этой диаграммой электромагнитная мощность Рэм, определяемая в соответствии с (8.39) через электромагнитный момент М и скорость идеального холостого хода ω0, отличается от потребляемой из сети мощности Р1 на величину электрических ΔР1э и магнитных ΔР1м потерь в статоре. Соответственно, выходная механическая мощность Р2 меньше электромагнитной мощности Рэм на величину электрических ΔР2э и магнитных ΔР2м потерь в роторе, а также механических ΔРмех и добавочных ΔРдоб потерь.
Коэффициент полезного действия электрической машины η определяется как отношение полезной мощности Р2 к подведенной Р1. При этом, в двигательном режиме работы полезная мощность – механическая мощность на валу, а подведенная – электрическая мощность, потребляемая из источника питания. В генераторном режиме, наоборот, полезной является вырабатываемая электрическая мощность, а подведенной – механическая. В любом случае, с учетом того, что Р1= Р2 + ΔРΣ, имеем

Учитывая, что полезная мощность растет примерно пропорционально току в силовой цепи двигателя, а электрические потери, в соответствии с (8.88), растут пропорционально квадрату тока, зависимость η(P2), имеет максимум, когда постоянные потери равны переменным. Обычно при проектировании электрических машин их параметры выбирают так, чтобы максимум КПД достигался при нагрузке 0,6 – 0,8 от номинальной нагрузки Р2н, т.к. в большинстве случаев они работают с недогрузкой в 15 – 20%. Типичный вид кривой η(P2/P2н) показан на рис. 8.68.
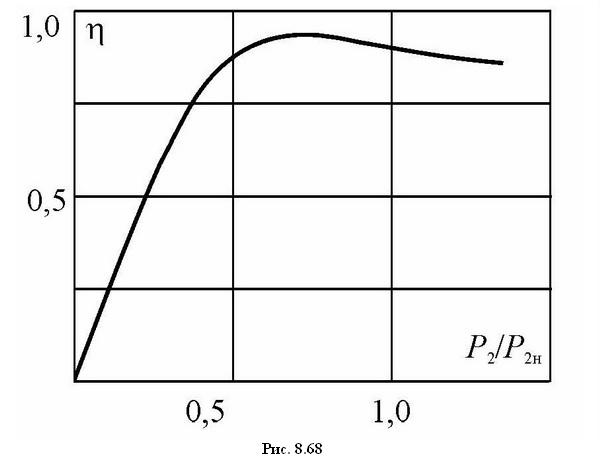
Современные электрические машины имеют достаточно высокий КПД, который увеличивается по мере роста их номинальной мощности. Так, у двигателей постоянного тока мощностью около 10 кВт от составляет 83 – 87%, а мощностью 100 кВт уже 88 – 93%. Однако в машинах малой мощности, например, порядка 10 Вт, он может составлять всего 20 – 30%.
Коэффициент мощности cosφ является одним из важнейших энергетических показателей электрических машин переменного тока. Он определяется отношением активной мощности, потребляемой из сети P1 к полной мощности S1. Разница между этими мощностями, как уже отмечалось, обусловлена наличием реактивной мощности Q1, которая частично расходуется на создание основного магнитного поля, за счет которого происходит передача энергии от статора ротору, а частично на создание полей рассеяния статора и ротора.
Чем меньше реактивная составляющая мощности, потребляемой из сети при той же мощности на валу, тем выше энергетическая эффективность работы электрической машины. Особенно важен этот показатель для основных потребителей электрической энергии в промышленности – асинхронных двигателей, у которых нет отдельной обмотки возбуждения и магнитное поле создается только энергией, потребляемой из сети переменного тока.
Зависимость cosφ(Р2) для асинхронной машины можно найти, выразив полную мощность S1 через активную мощность P1 и реактивную Q1, т.е.
Представив потребляемую активную мощность P1 через мощность на валу P2 и потери ΔРΣ, получаем:
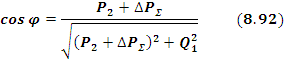
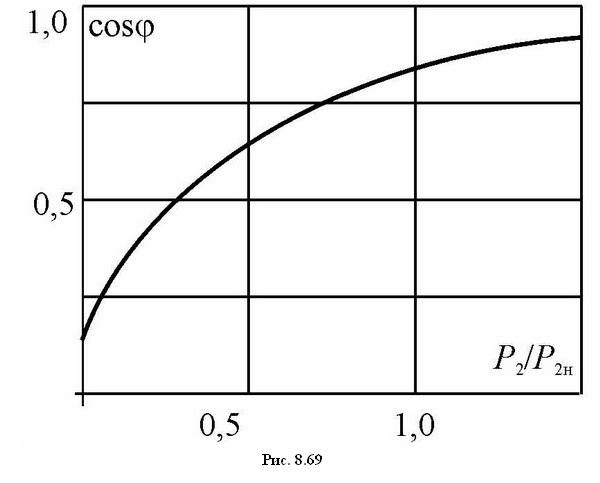
У машин обычного исполнения основной магнитный поток значительно превышает потоки рассеяния и практически не зависит от нагрузки, что дает основание в первом приближении считать Q1 величиной постоянной. Тогда, как следует из соотношения (8.92), изменение cosφ связано только с изменением мощности нагрузки на валу Р2 и потерь ΔРΣ. Примерный вид зависимости cosφ(P2/P2н) для асинхронных двигателей общепромышленного исполнения показан на рис. 8.69.
Как видно из соотношения (8.92), при отсутствии нагрузки на валу двигателя ненулевое значение cosφ обусловлено только активной составляющей потребляемой из сети мощности, идущей на покрытие постоянных потерь. С ростом нагрузки значение cosφ также растет, однако в области малых нагрузок оно остается достаточно низким. По этой причине использование АД при длительных недогрузках является нежелательным. Обычно при номинальной нагрузке значение cosφ общепромышленных асинхронных двигателей мощностью до 100 кВт составляет примерно от 0.7 до 0.9, а при большей мощности достигает значений от 0.9 до 0.95.